1整车CAN网络设计规范目次1范围22规范性引用文件23定义和术语24总体设计要求2CAN总线架构详见图1
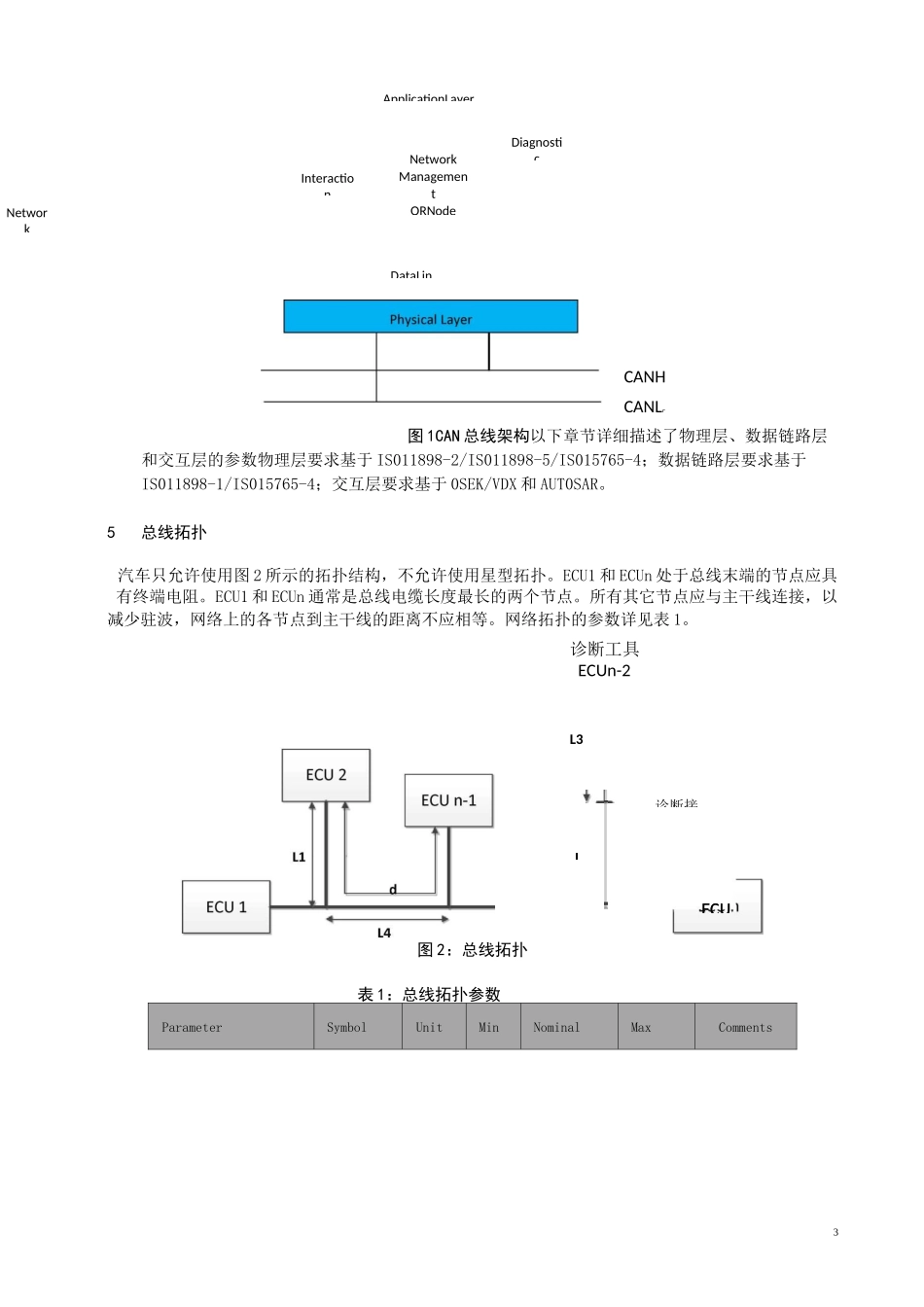
25总线拓扑36导线46
1导线的参数46
2双绞线在连接器处的绞缠要求47整车供电要求48总线故障管理48
1节点故障48
2开路和短路故障59周期型消息和混合型消息的周期偏差62整车CAN网络设计规范1范围本范规覆盖整车CAN网络盖物理层、数据链路层、交互层的相关要求
本规范适用于汽车各车型
2规范性引用文件下列文件对于本文件的应用是必不可少的
凡是注日期的引用文件,仅注日期的版本适用于本文件凡不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件
IS011898-1:道路车辆一电控单元局域网(CAN)—第一部分:数据链路层和物理信号IS011898-2:道路车辆一电控单元局域网(CAN)—第二部分:高速介质访问单元IS011898-5:道路车辆一电控单元局域网(CAN)—第五部分:低功耗模式的高速介质访问单元SAEJ2284-3:500Kbps下车辆用高速CANISO15765-4:道路车辆一控制局域网络诊断(CAN)—第四部分:排放相关系统要求3定义和术语下列术语和定义适用于本文件
1术语的用法如下:“要求”:表示一种必须/强制的需求
“应当”:表示一种推荐或建议
“必须”:表示一种合法或标准的需求
“将会”:表示一种预计的考虑情况,或者一种附加或可选的特性
“可以”:表达一种被允许的行为或方法,并不认定为需求
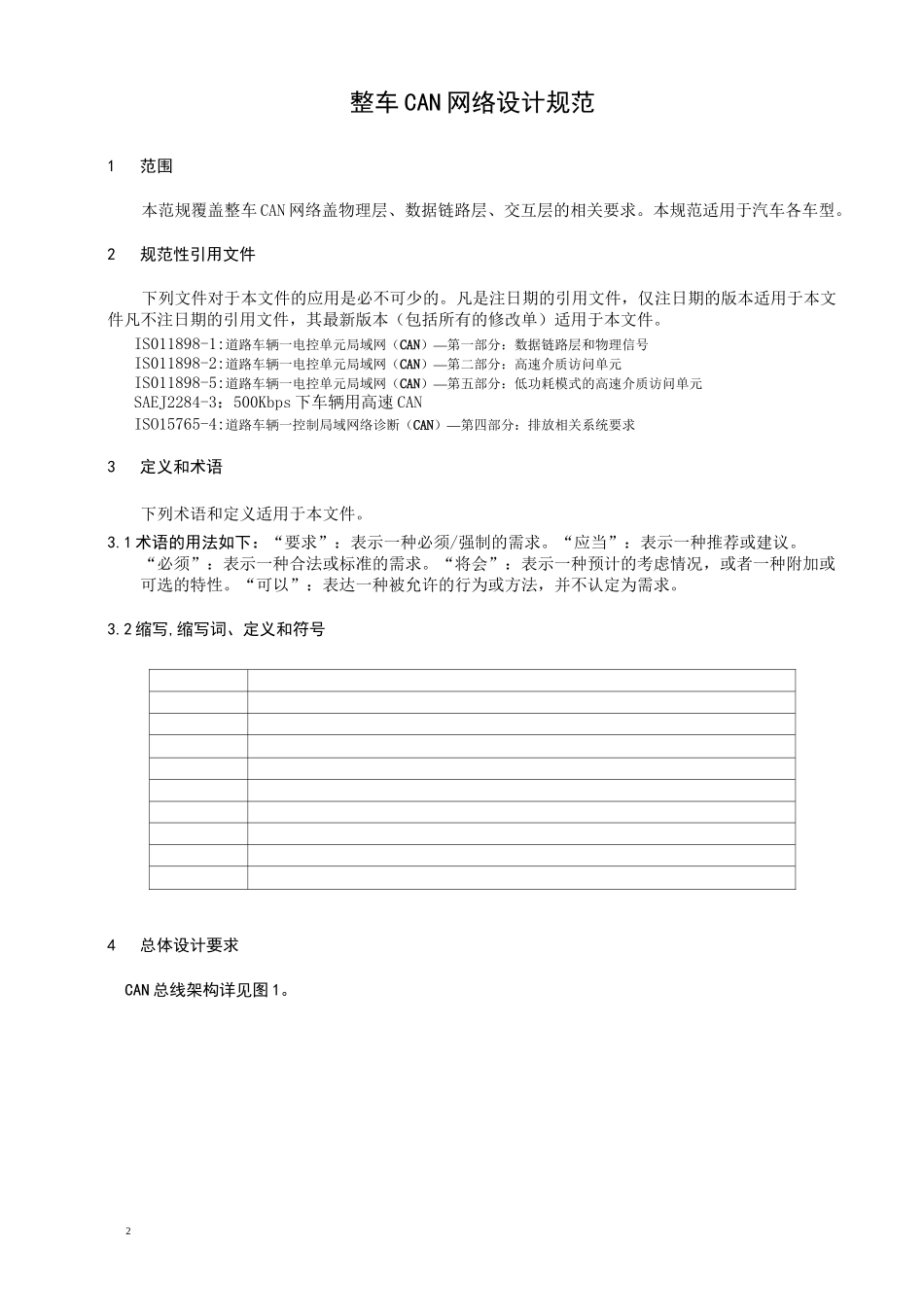
2缩写,缩写词、定义和符号4总体设计要求CAN总线架构详见图1
ApplicationLayerInteractionNetworkManagementORNodeDiagnosticNetworkCANHCANLCL诊断接3图1CAN总线架构以下章节详细描述了物理层、数据链路层和交互层的参数物理层要求基于IS011898-2/IS0