典型作业级ROV结构介绍1
前言地球上海洋面积为3
6亿平方公里,约占地球表面的71
8%,是生命的摇篮、资源的宝库,人类可持续发展的源泉
进入21世纪后,重视海洋、探索海洋、研究海洋、开发海洋,以及保护海洋成为全球各国的重要课题
我国十八大提出了海洋强国战略,国家发改委等4部委近日下发《关于印发海洋工程装备产业创新发展战略(2011-2020)的通知》,推动海洋工程装备产业发展
国家“深海关键技术与装备”重点专项也将全海深(最大工作深度11000米)潜水器研制及深海前沿关键技术作为重点攻关方向
水下机器人是一种具有人的一部分或大部分功能,能够在海洋环境下代替人进行某种作业的自动控制装置
通常是依靠电缆提供的动力或自身携带的能源驱动,载体上装有推进器在水下做三维空间运动,并可装设照明、摄像、声纳等观测设备,多种传感器及用来完成某些作业的机械手和作业工具
水下机器人大致可分为三类:有缆遥控水下机器人ROV、自治水下机器人AUV、载人潜水器HOV,最近国外如美国伍兹霍尔海洋研究所研究一款混合水下机器人HROV
ROV根据用途不同又分为观察型、调查型、作业型,就不再展开讲,本文以下内容以作业型机器人为例展开介绍
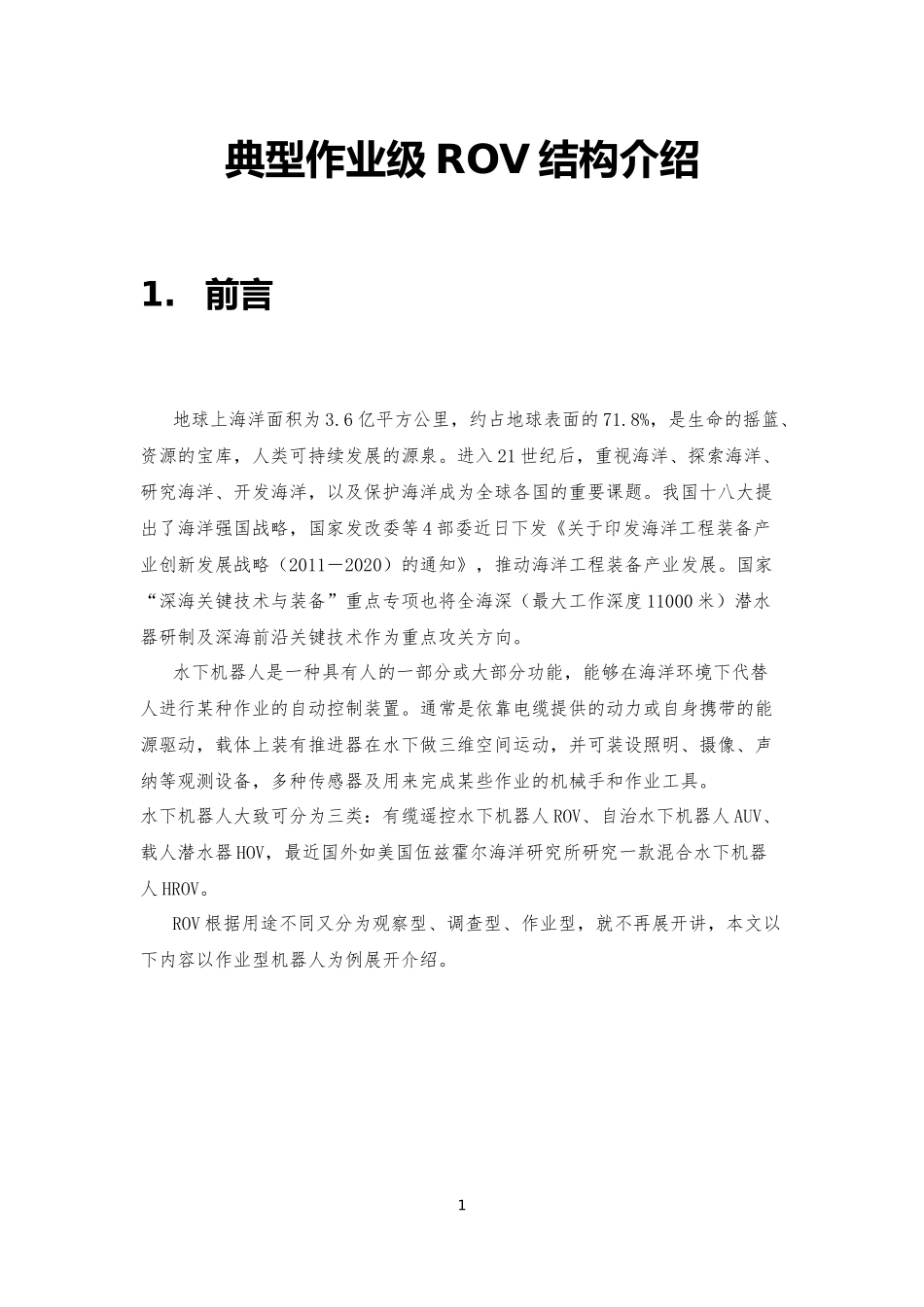
作业级ROV系统概述一套ROV由支持母船、配电系统、控制室、布放与回收系统、中继器(大型ROV)、脐带缆、无人潜水器、作业机械手等部分组成
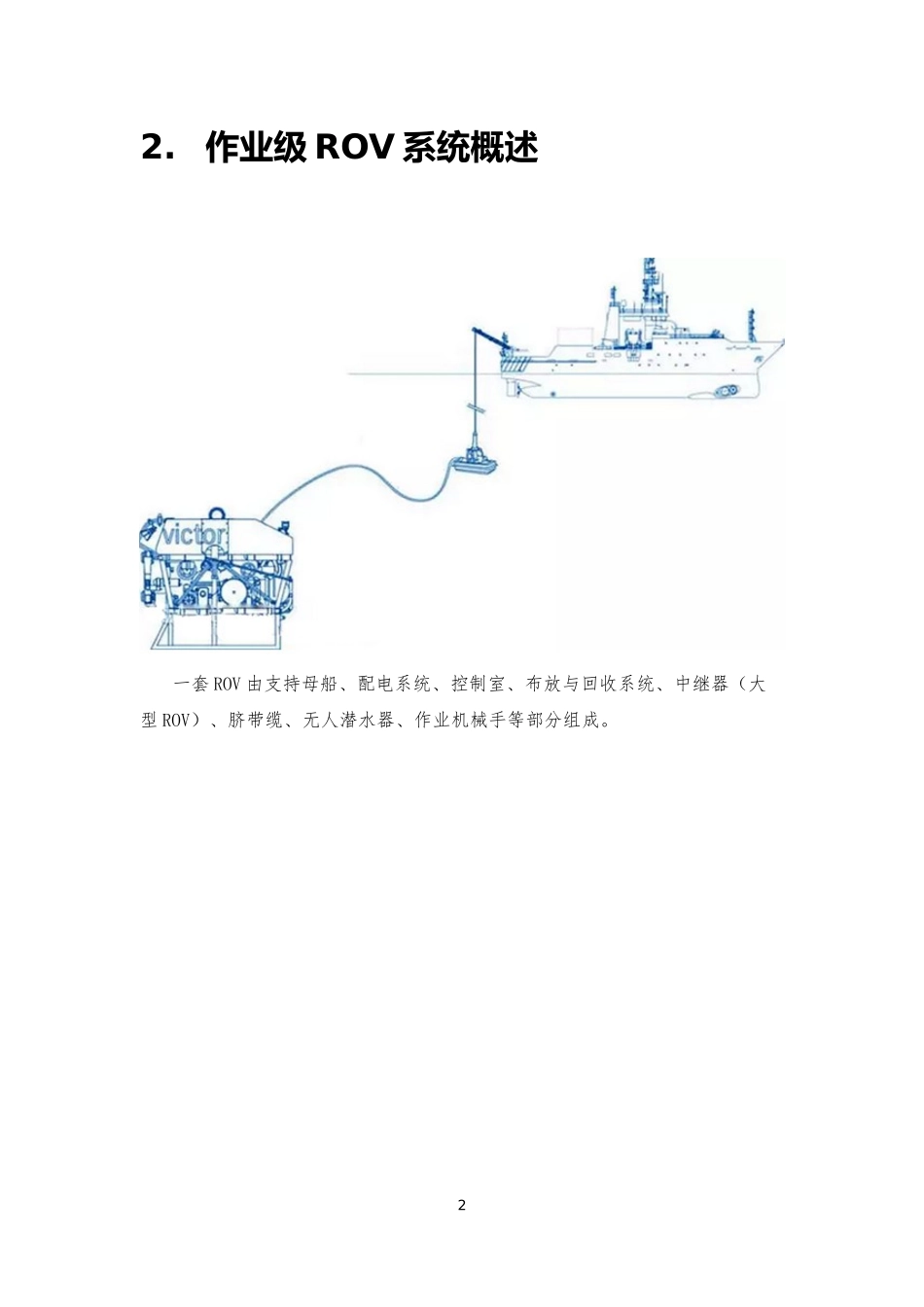
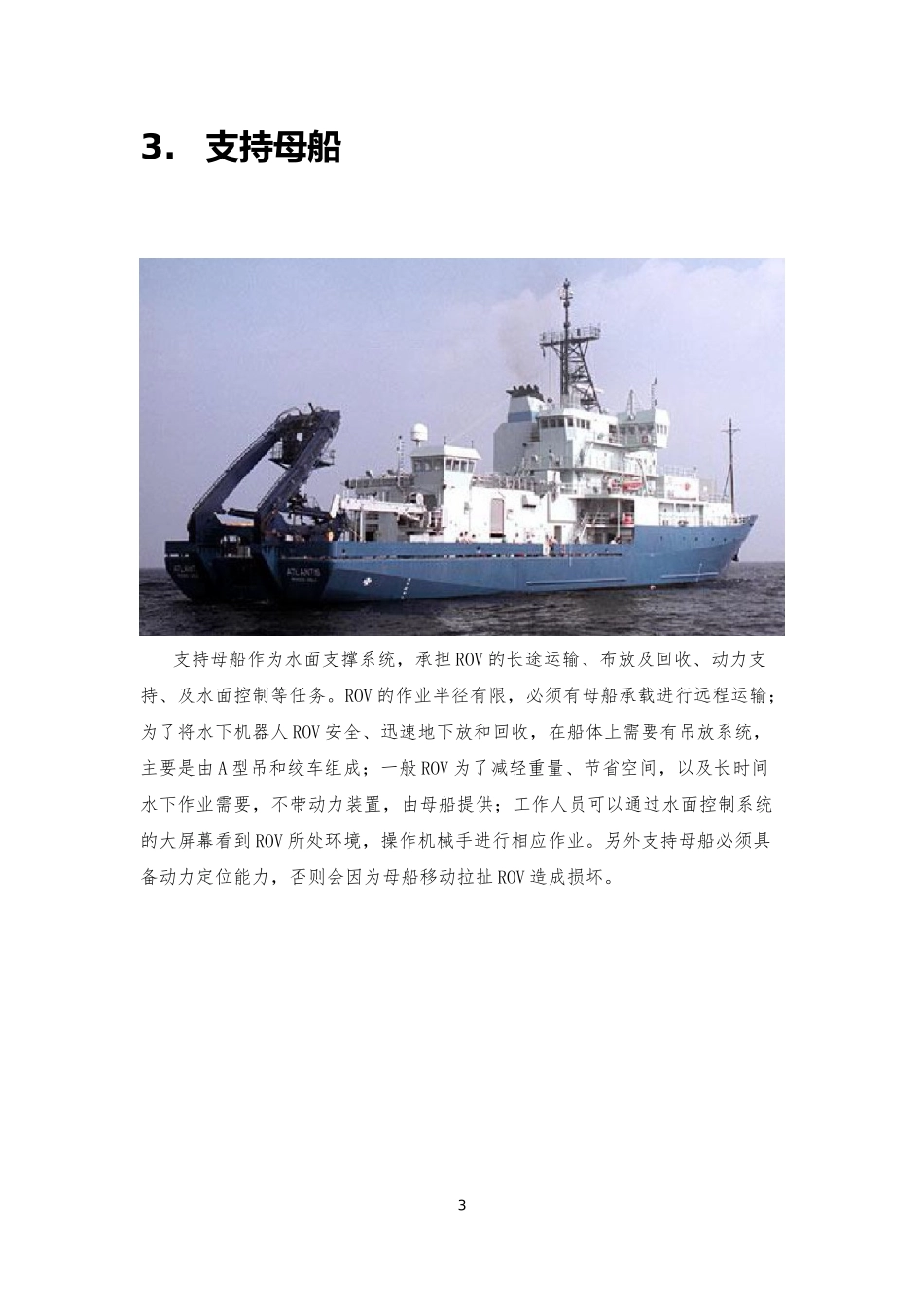
支持母船支持母船作为水面支撑系统,承担ROV的长途运输、布放及回收、动力支持、及水面控制等任务
ROV的作业半径有限,必须有母船承载进行远程运输;为了将水下机器人ROV安全、迅速地下放和回收,在船体上需要有吊放系统,主要是由A型吊和绞车组成;一般ROV为了减轻重量、节省空间,以及长时间水下作业需要,不带动力装置,由母船提供;工作人员可以通过水面控制系统的大屏幕看到ROV所处环境,操作机械手进行相应作业
另外支持母船必须具备