第7章平面问题高阶单元7
1位移模式阶次的选择在前面两章中讨论了平面问题三结点三角形单元,其位移模式的最高阶是坐标x、y的一次项
这种位移模式导致单元常应变、常应力特性,单元应变矩阵、应力矩阵、刚度矩阵均为常数矩阵,因此计算非常简单
但这种单元难以反映应力梯度的迅速变化
要想提高计算精度,必须细分网格,增加单元数和点数,因而加大输入数据的工作量
提高计算精度的另一条有效途径是采用高阶单元
由于高阶单元的应变、应力不再是常数,因此采用少量单元就可能达到较高的精度
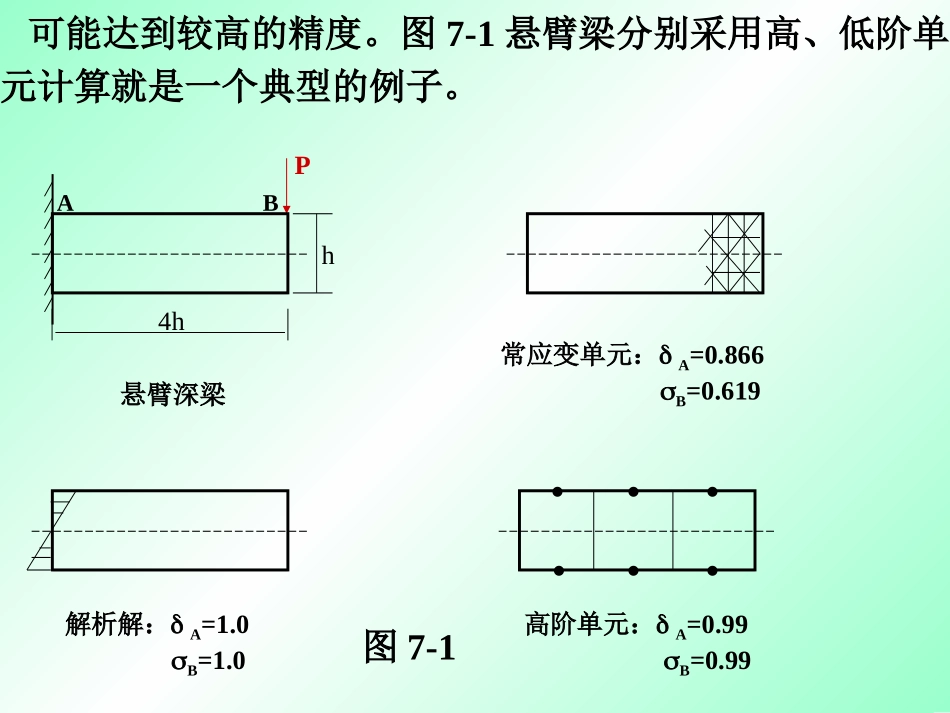
图7-1悬臂梁分别采用高、低阶单元计算就是一个典型的例子
h4hPAB悬臂深梁解析解:A=1
0常应变单元:A=0
866B=0
619高阶单元:A=0
99B=0
99••••••图7-1选择位移模式时,第2章提到要考虑解的收敛性,即要考虑到位移模式的完备性和协调性
实际操作中,一般应考虑位移模式的对称性
这是因为,有限元位移模式的选择实际是以帕斯卡(Pascal)三解形基础上的(如图7-2所示),由低价至高阶,顺序选取,组成多项式
多项式中的项数等于单元节点自由度数
如三节点三角形单元,位移模式取完全一次式,共3项
六节点三角形单元,位移模式取完全二次式共6项
如果某一阶次不能全取,则应按对称性原则适当选取
1xyx2xyy2x3x2yxy2y3x4x3yx2y2xy3y4图7-2多项式选择的怕斯卡三角形1xyx2xyy2x3x2yxy2y3x4x3yx2y2xy3y4图7-2多项式选择的怕斯卡三角形例如在下节将要讨论的四结点矩形单元中,位移模式不能取1,x,y,x2四项,也不能取1,x,y,y2四项,而应取1,x,y,xy四项
2四节点矩形单元图7-3示出的矩形单元,边长分别为2a和2b
取4个角点为节点,编号为i,j,l,m
将x轴和y轴置于单元的对称轴上
单元的位移函数可取为:1、