8正逆运动学求解基础知识坐标变换的最终目的是确定机器人各杆件之间的相互位置关系,通过关节角的值计算末端操作器在空间位置(正运动学)或预算出末端操作器在要求位置的关节角(逆运动学)
主要包括以下内容:1)相对杆件的坐标系的确定;2)建立各连杆的模型矩阵A;3)正运动学算法;4)逆运动学算法
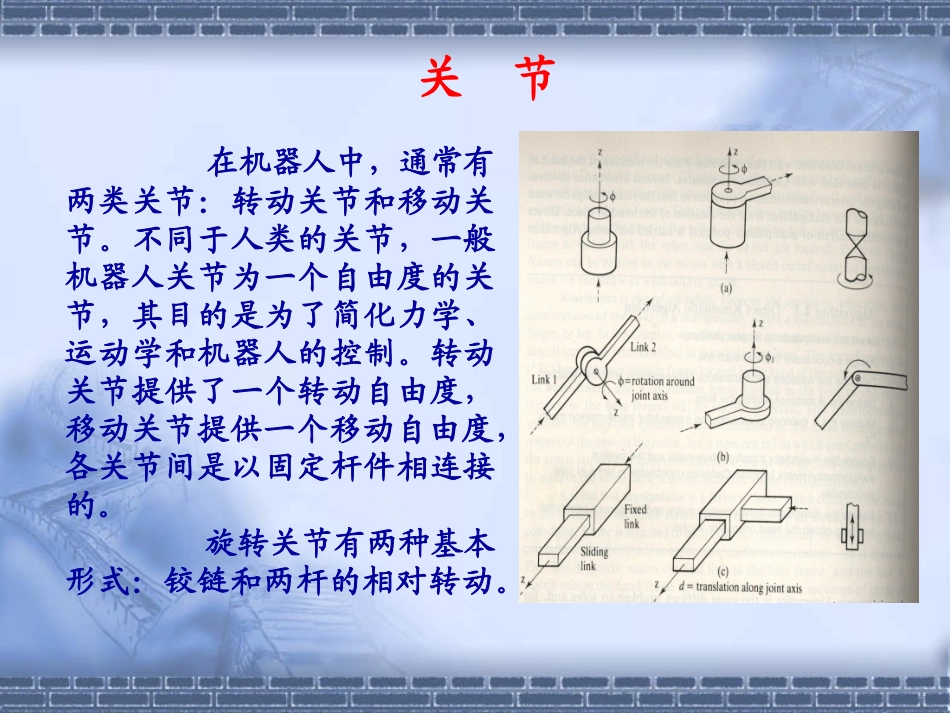
在机器人中,通常有两类关节:转动关节和移动关节
不同于人类的关节,一般机器人关节为一个自由度的关节,其目的是为了简化力学、运动学和机器人的控制
转动关节提供了一个转动自由度,移动关节提供一个移动自由度,各关节间是以固定杆件相连接的
旋转关节有两种基本形式:铰链和两杆的相对转动
关节杆件机器人杆件是连接两个关节的固定物体(机械)
机器人杆件的主要目的是用来保持该关节与各相关末端关节一个固定的关系
机器人末端杆件只有一个关节,位于最接近末端(或机座)的位置
在最远离机座的末端,通常是附加一个手爪
为了更容易、清楚地解释一个机器人的末端和其各关节点的关系,课程中只以有限的杆件数作为研究讨论对象
实际上,为了使得机器人更容易制造,类似的限制在机器人制造中也使用
下面给出了八种类型的常见杆件构形:1)两个平行的转动关节且在两轴间没有扭转;连杆参数ln—连杆的长度;如果连杆的中心线被认作x方向并且从关节n-1到关节n沿xn-1方向有一定距离,整个杆件可以绕关节n-1转动n角,该角认为是两连杆夹角并且这个角就是一般转动关节的变量;同时关节轴被认为是z方向并且绕zn-1转动;y轴由右手定则确定
坐标系及其相关参数确定:一、坐标系确定(1)Zn-1的确定(转轴轴线)(2)Xn-1:垂直两连杆公垂线xn-1=zn-1→zn(3)Yn-1:根据右手定则确定二、参数确定(1)连杆长度ln:zn-1→zn沿xn-1的距离;(2)两关节轴扭角n:zn-1→zn绕xn的转角;(3)dn:两连杆间偏置:xn-1→