堆垛机能力计算堆垛机效能指标参数项目参数最大水平行走速度VX120m/min(2m/s)最大水平行走加速度aX0
3m/s2最大升降速度VZ40m/min(0
67m/s)最大升降加速度aZ0
5m/s2货叉循环周期T10s最大水平仃走距离L12
6m最大升降距离H6m穿梭板效能指标参数项目参数最大水平行走速度VYX60m/min(1m/s)最大水平行走加速度aX0
3m/s2平均对接周期T10s最大水平仃走距离L7
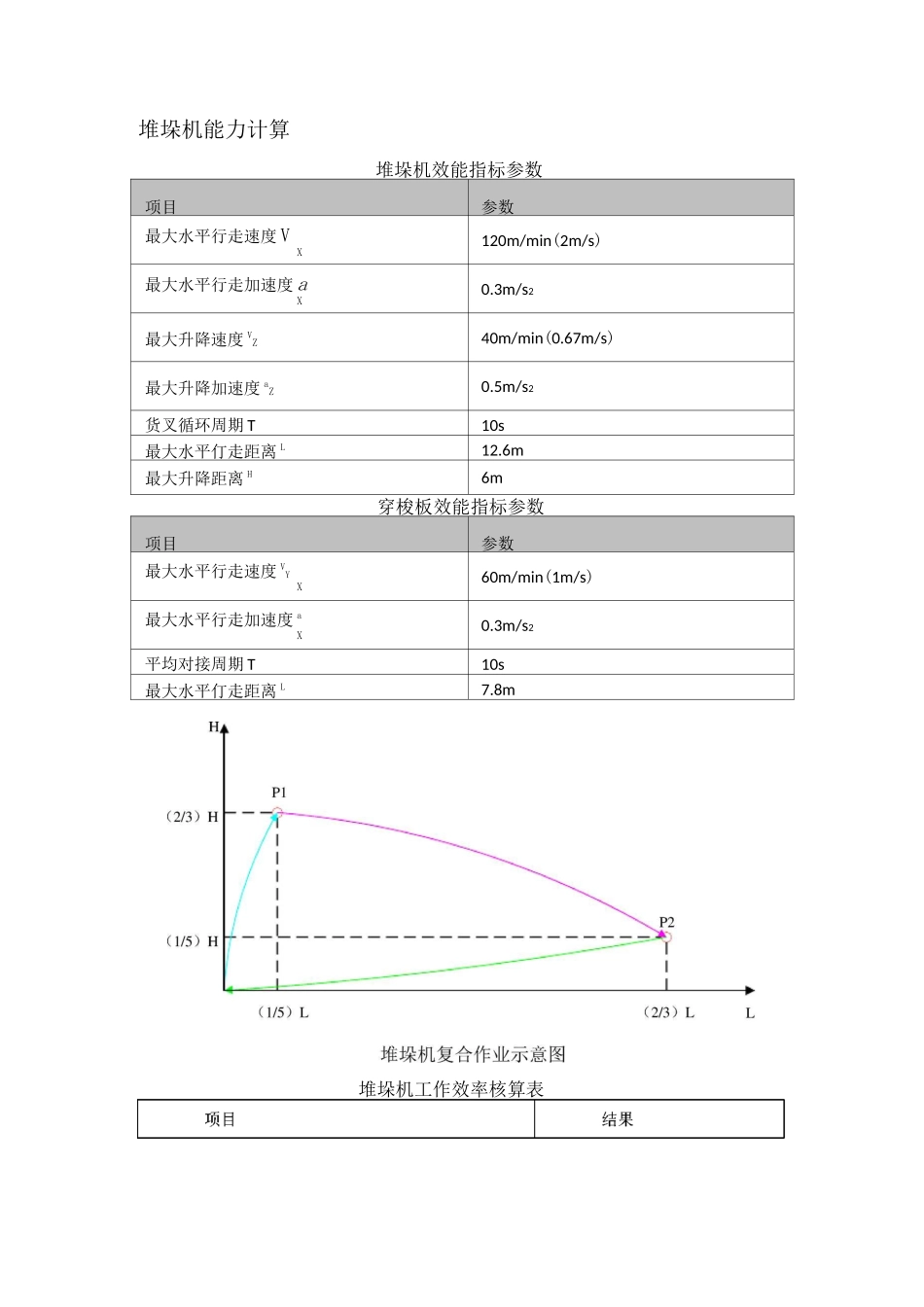
8m堆垛机工作效率核算表A入库堆垛机入库——穿梭板放货——穿梭板返回堆垛机——堆垛机回到原点B穿梭板取货——堆垛机自原点到穿梭板接货位置——穿梭板上堆垛机——堆垛机到原点放货各任务所需时间任务号任务耗时(s)A58
09计算结果得出入库效率为61
9次每小时,出库效率为61
9次每小时74
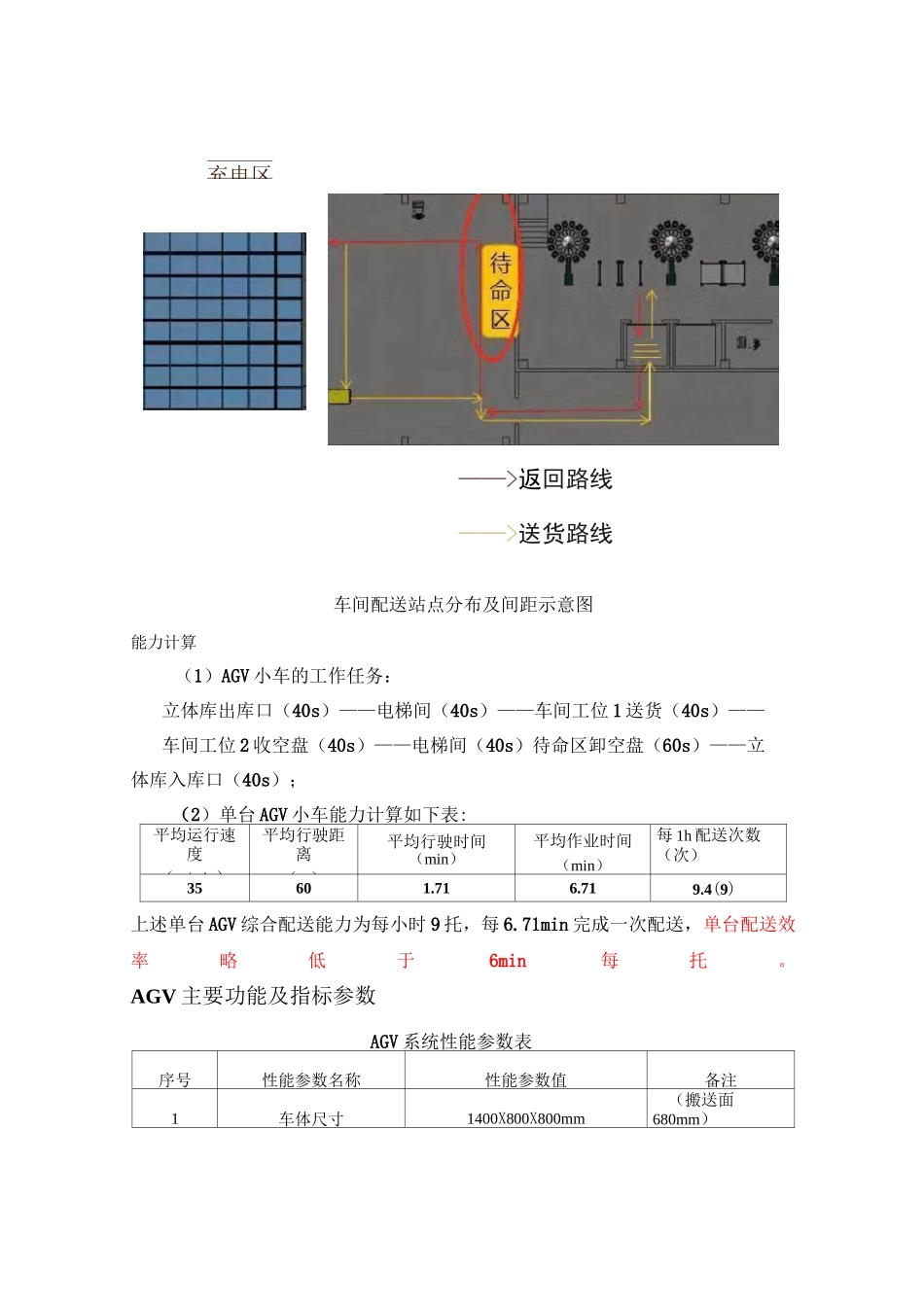
AGV搬运能力计算AGV平均运行速度为35m/min,站点分布示意图如下所示,单次往返最大运行距离约80m(电梯上下距离不计)
充电区——>返回路线——>送货路线车间配送站点分布及间距示意图能力计算(1)AGV小车的工作任务:立体库出库口(40s)——电梯间(40s)——车间工位1送货(40s)——车间工位2收空盘(40s)——电梯间(40s)待命区卸空盘(60s)——立体库入库口(40s);(2)单台AGV小车能力计算如下表:平均运行速度(m/min)平均行驶距离(m)平均行驶时间(min)平均作业时间(min)每1h配送次数(次)35601
4(9)上述单台AGV综合配送能力为每小时9托,每6
71min完成一次配送,单台配送效率略低于6min每托
AGV主要功能及指标参数AGV系统性能参数表序号性能参数名称性能参数值备注1车体尺寸1400X800X800mm(搬送面680mm)2额定承载载重1000kg含托盘3导引方式磁条导航4