http://www
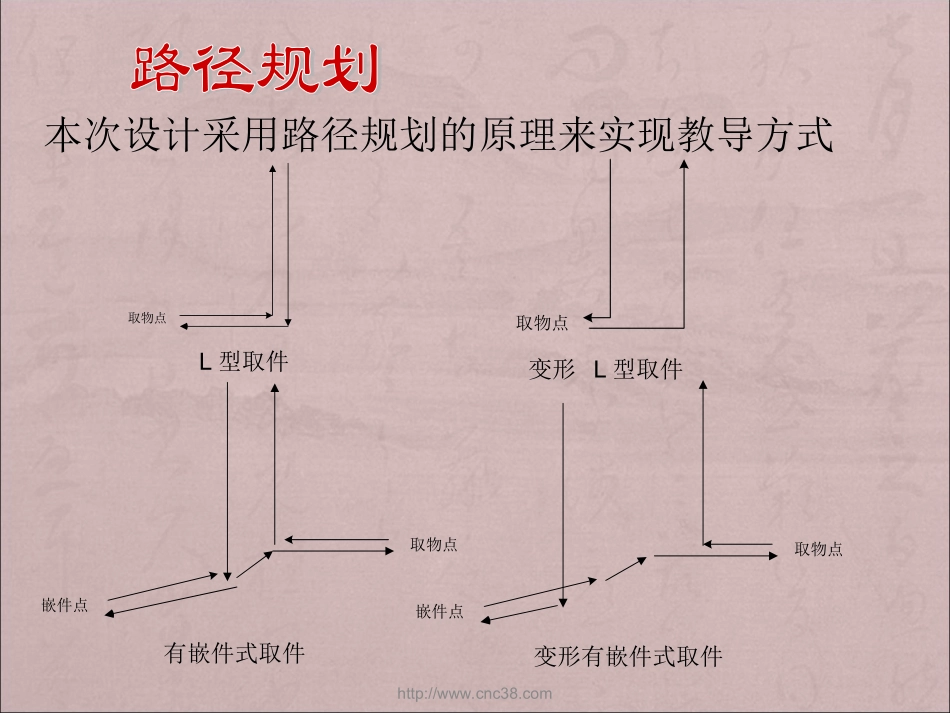
com本次设计采用路径规划的原理来实现教导方式取物点取物点嵌件点取物点嵌件点取物点L型取件变形L型取件有嵌件式取件变形有嵌件式取件http://www
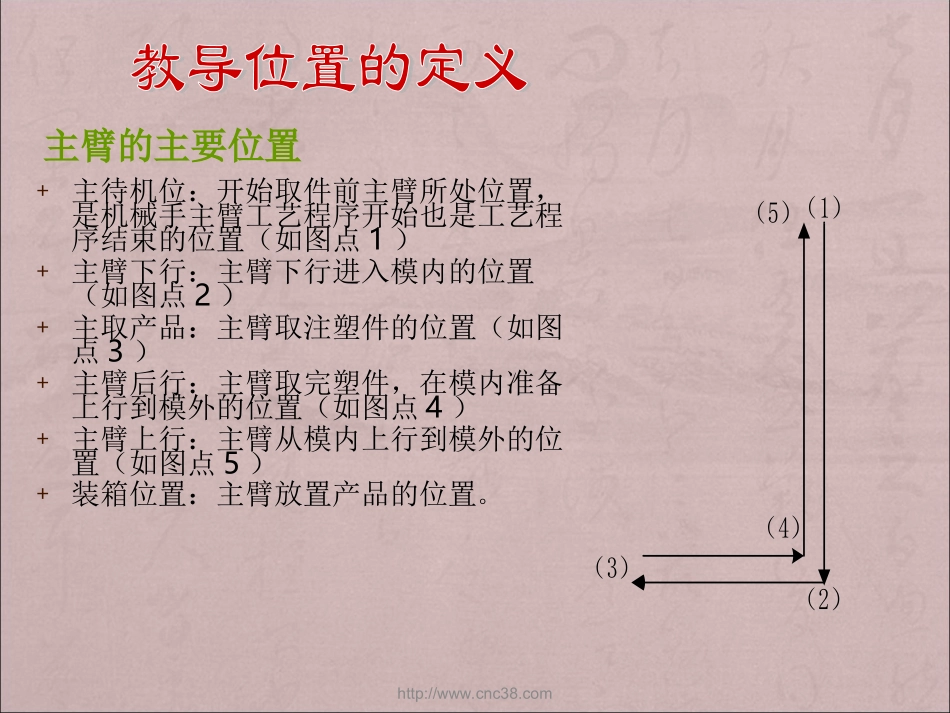
com+主待机位:开始取件前主臂所处位置,是机械手主臂工艺程序开始也是工艺程序结束的位置(如图点1)+主臂下行:主臂下行进入模内的位置(如图点2)+主取产品:主臂取注塑件的位置(如图点3)+主臂后行:主臂取完塑件,在模内准备上行到模外的位置(如图点4)+主臂上行:主臂从模内上行到模外的位置(如图点5)+装箱位置:主臂放置产品的位置
主臂的主要位置(1)(5)(2)(3)(4)http://www
com副待机位:开始取件前副臂所处位置,是机械手副臂工艺程序开始也是工艺程序结束的位置(如图点6)副臂下行:副臂下行进入模内的位置(如图点7)副夹水口:副臂夹取水口的位置(如图点8)副臂后行:副臂夹完水口,在模内准备上行到模外的位置(如图点9)副臂上行:主臂从模内上行到模外的位置(如图点10)副放水口:副臂放置水口的位置
副臂的主要位置(6)(10)(7)(8)(9)http://www
com主臂运动顺序(1)(5)(2)(3)(4)主待机位→主臂下行→主取产品→主臂后行→主臂上行→装箱位置(不良品位)教导时主臂的定位顺序主取产品→主臂后行,主臂下行→主待机位→主臂上行→装箱位置(不良品位)http://www
com副臂运动顺序副待机位→副臂下行→副夹水口→副臂后行→副臂上行→副放水口教导时副臂的定位顺序副夹水口→副臂后行,副臂下行→副待机位→副臂上行→副放水口(6)(10)(7)(8)(9)http://www
com教导程序主画面介绍http://www
com教导程序验证画面介绍http://www