一、已知系统的状态方程为5432ss3s9s16s100 ,试用劳斯判据判定系统的稳定性
若系统不稳定,指出在s 平面右半部的特征根的数目
二、已知随动系统如下图所示,当K=8时,试求:(1) 系统的特征参量n
和(2) 系统的动态性能指标%s和 t三、已知系统的开环传递函数为2)1)(ss(sK(s)Ggk,试绘制系统的根轨迹
四、已知单位反馈系统的开环传递函数为G(s)=1/(s+1),试根据频率特性的物理意义,求闭环系统输入信号为r(t)=sin2t 时系统的稳态输出
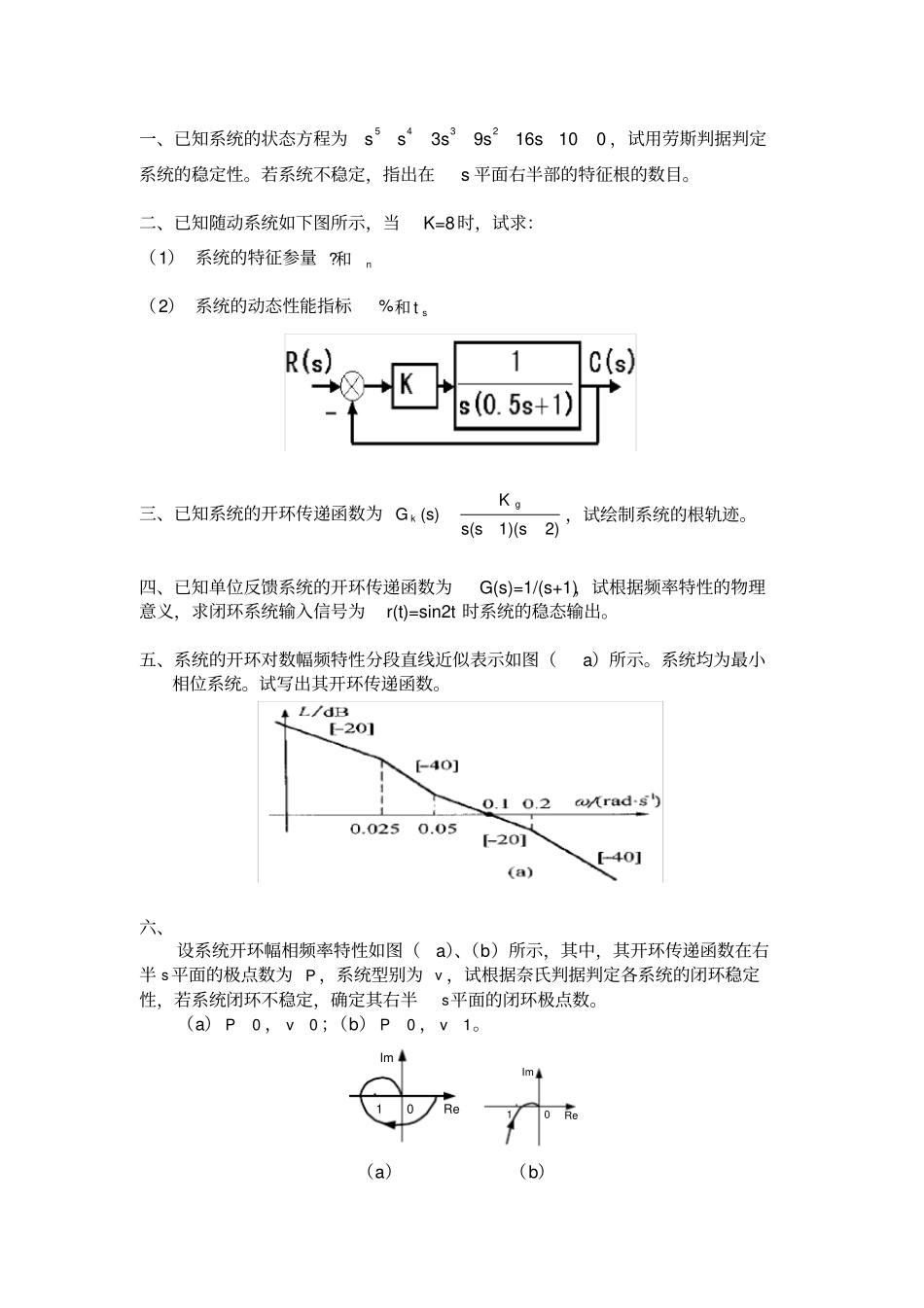
五、系统的开环对数幅频特性分段直线近似表示如图(a)所示
系统均为最小相位系统
试写出其开环传递函数
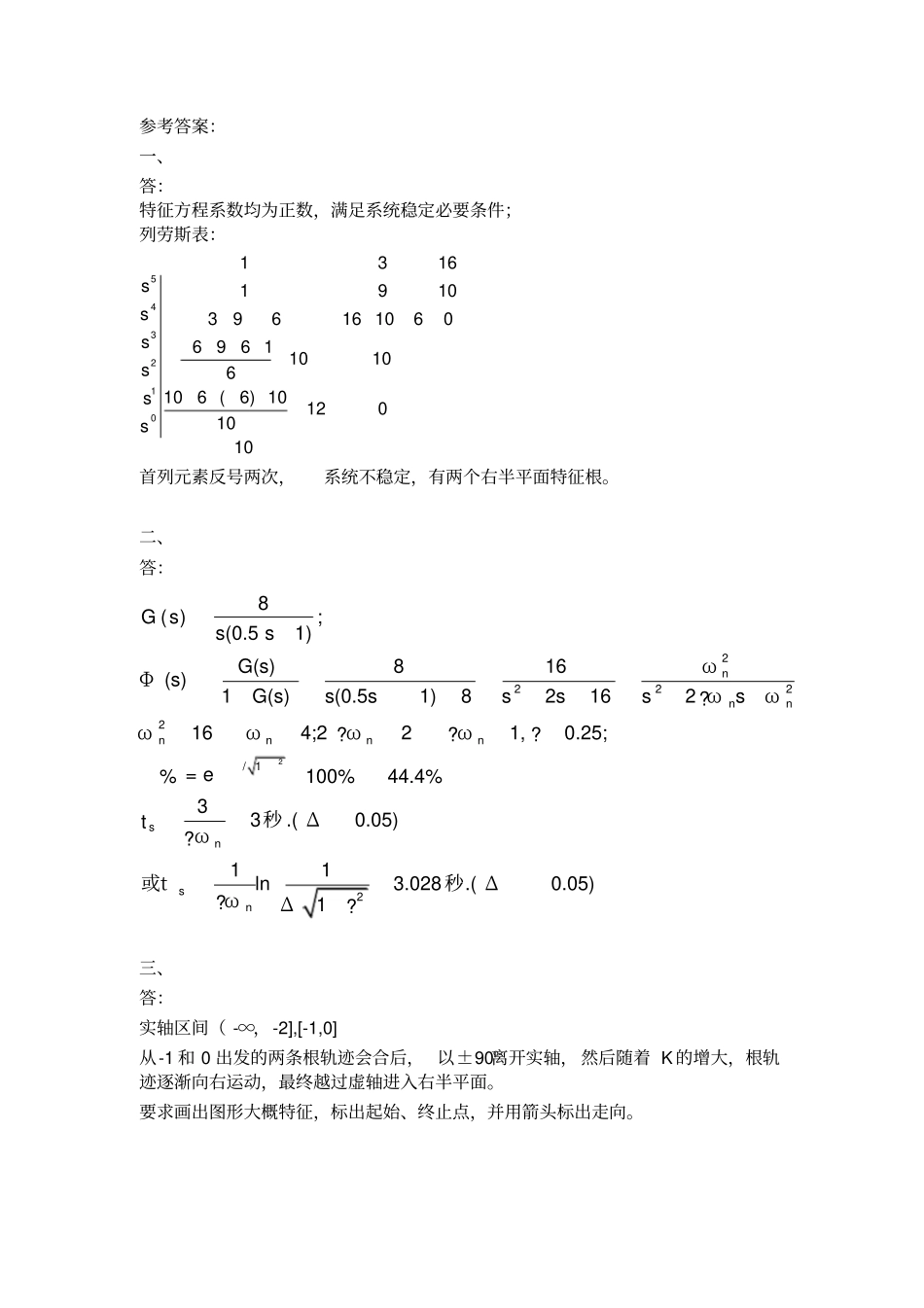
六、设系统开环幅相频率特性如图(a)、(b)所示,其中,其开环传递函数在右半 s平面的极点数为P ,系统型别为 v ,试根据奈氏判据判定各系统的闭环稳定性,若系统闭环不稳定,确定其右半s平面的闭环极点数
(a)0P,0v;(b)0P,1v
Im01Re01ImRe(a)(b)七、用 Z 变换法解二阶差分方程1c(1)0,已知c(0)0,2c(n)1)3c(n2)c(n
参考答案:一、答:特征方程系数均为正数,满足系统稳定必要条件;列劳斯表:5432101316s1910s39616 1060s696 11010s6106 (6) 10s12010s10首列元素反号两次,系统不稳定,有两个右半平面特征根
二、答:2/18( );(0
%100%44
G ssst秒2n222nn2nnnnsns2nωG(s)816Φ (s)1G(s)s(0
5s1)8s2s16s2 ω sωω16ω4;2ω2ω1,0
25;= e33
05)ω11或tln3
05)ωΔ1三、答:实轴区间( -∞,-2],[-1,0]从-1 和 0 出发的两条根轨迹会合后, 以±90°离