1 双轴位置控制系统的设计1、设计任务与目的1
1 了解系统的机械结构,控制要求;1
2 掌握气动控制技术的要求;1
3 熟练掌握 step7micro/win中 PTO指令
2、设计要求2
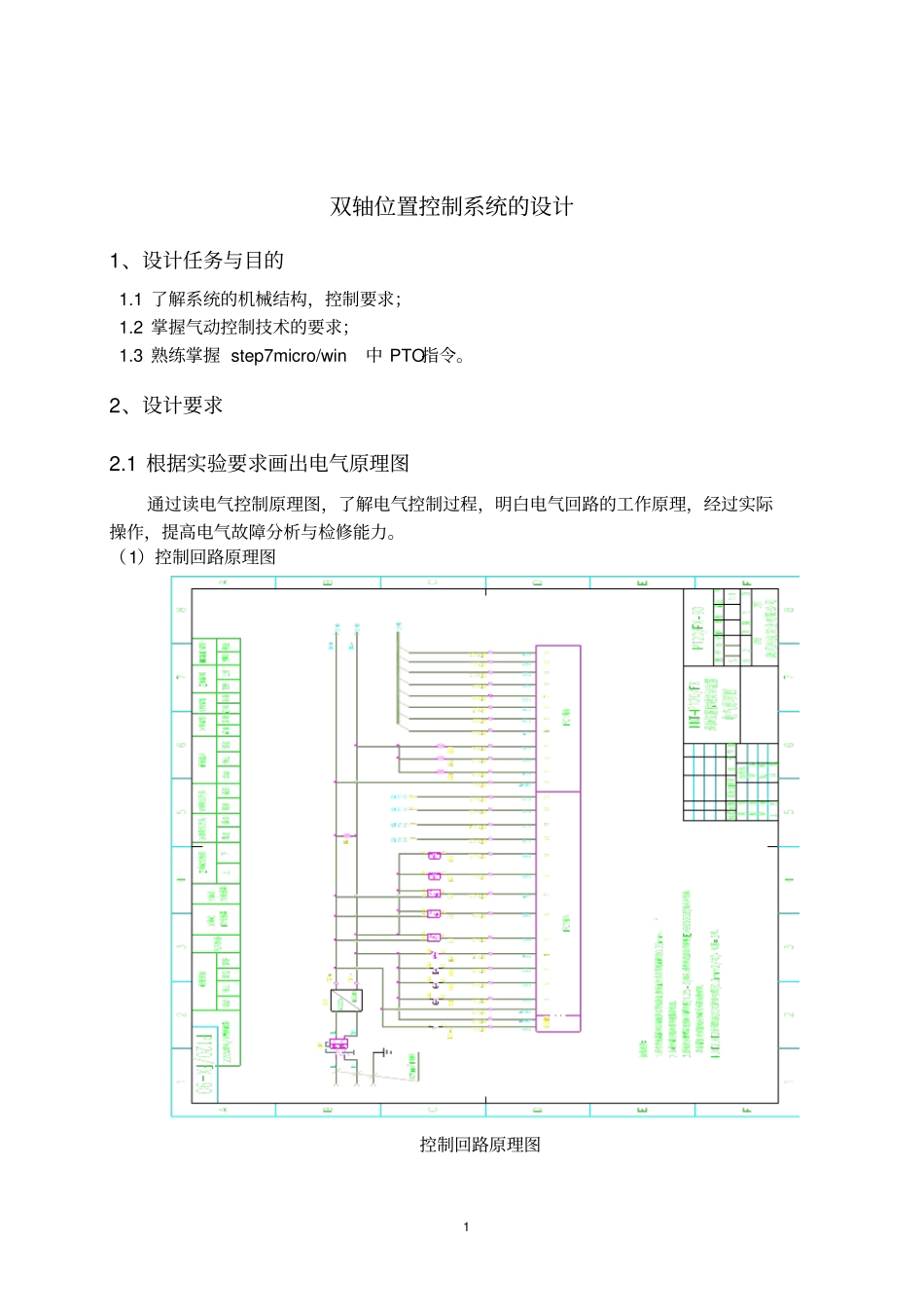
1 根据实验要求画出电气原理图通过读电气控制原理图,了解电气控制过程,明白电气回路的工作原理,经过实际操作,提高电气故障分析与检修能力
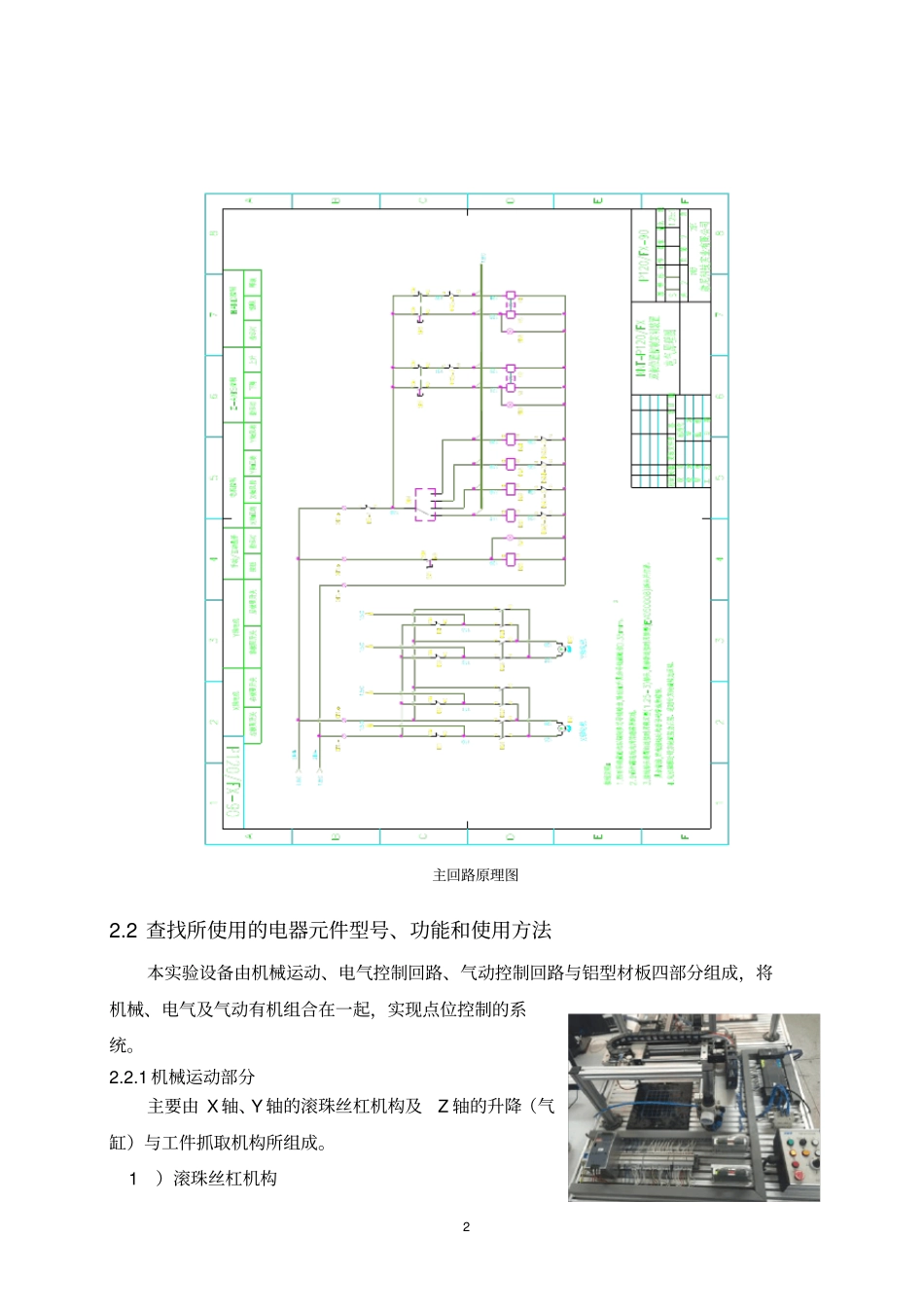
(1)控制回路原理图控制回路原理图2 主回路原理图2
2 查找所使用的电器元件型号、功能和使用方法本实验设备由机械运动、电气控制回路、气动控制回路与铝型材板四部分组成,将机械、电气及气动有机组合在一起,实现点位控制的系统
1 机械运动部分主要由 X 轴、Y 轴的滚珠丝杠机构及Z 轴的升降(气缸)与工件抓取机构所组成
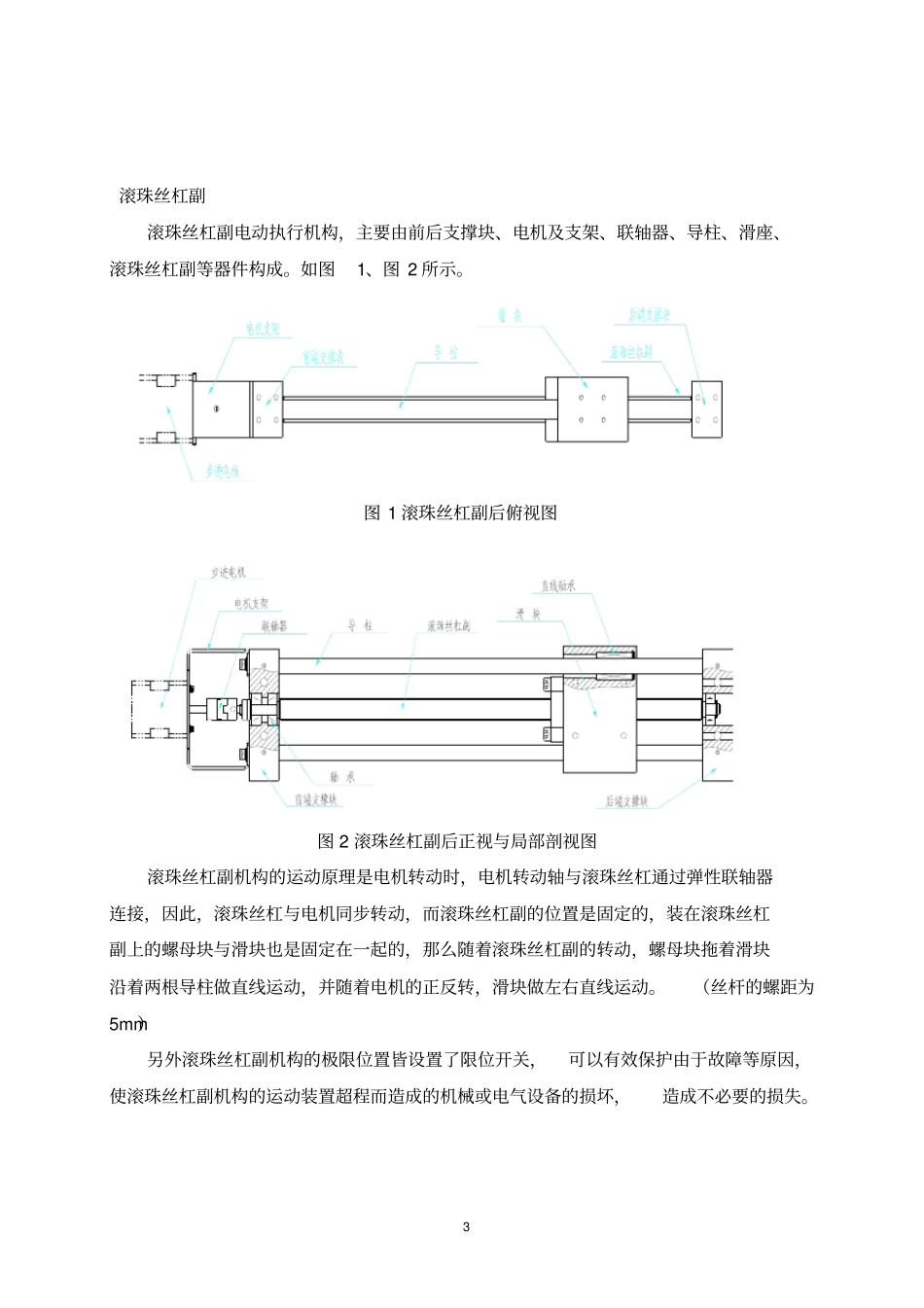
1)滚珠丝杠机构3 滚珠丝杠副滚珠丝杠副电动执行机构,主要由前后支撑块、电机及支架、联轴器、导柱、滑座、滚珠丝杠副等器件构成
如图1、图 2 所示
图 1 滚珠丝杠副后俯视图图 2 滚珠丝杠副后正视与局部剖视图滚珠丝杠副机构的运动原理是电机转动时,电机转动轴与滚珠丝杠通过弹性联轴器连接,因此,滚珠丝杠与电机同步转动,而滚珠丝杠副的位置是固定的,装在滚珠丝杠副上的螺母块与滑块也是固定在一起的,那么随着滚珠丝杠副的转动,螺母块拖着滑块沿着两根导柱做直线运动,并随着电机的正反转,滑块做左右直线运动
(丝杆的螺距为5mm)另外滚珠丝杠副机构的极限位置皆设置了限位开关,可以有效保护由于故障等原因,使滚珠丝杠副机构的运动装置超程而造成的机械或电气设备的损坏,造成不必要的损失
4 Z 轴通过工厂自动化常用的气动双作用气缸和气动真空吸盘来控制取放工件
Z 轴方向的运动通过一个双作用气缸来实现
真空吸盘安装在双作用气缸的前端,通过电磁阀来控制气路通断,从来控制Z 轴的升降和真空吸盘来吸取释放工件
2 电气部分双轴位置控制设备的电气部分主要