双闭环直流电机调速系统的设计与MATLAB仿真1
1 双闭环调速系统的工作原理1
1 转速控制的要求和调速指标生产工艺对控制系统性能的要求经量化和折算后可以表达为稳态和动态性能指标
设计任务书中给出了本系统调速指标的要求
深刻理解这些指标的含义是必要的, 也有助于我们构想后面的设计思路
在以下四项中, 前两项属于稳态性能指标,后两项属于动态性能指标1
1 调速范围 D 生产机械要求电动机提供的最高转速和最低转速之比叫做调速范围,即m inm axnnD(1-1)1
2 静差率 s 当系统在某一转速下运行时,负载由理想空载增加到额定值所对应的转速降落,与理想空载转速之比,称作静差率,即%1000nnsnom(1-2)静差率是用来衡量调速系统在负载变化下转速的稳定度的
3 跟随性能指标在给定信号 R(t)的作用下,系统输出量C(t)的变化情况可用跟随性能指标来描述
具体的跟随性能指标有下列各项:上升时间rt ,超调量,调节时间st
4 抗扰性能指标此项指标表明控制系统抵抗扰动的能力,它由以下两项组成:动态降落%maxC,恢复时间vt
2 调速系统的两个基本方面在理解了本设计需满足的各项指标之后,我们会发现在权衡这些基本指标,即1)动态稳定性与静态准确性对系统放大倍数的要求;2)起动快速性与防止电流的冲击对电机电流的要求
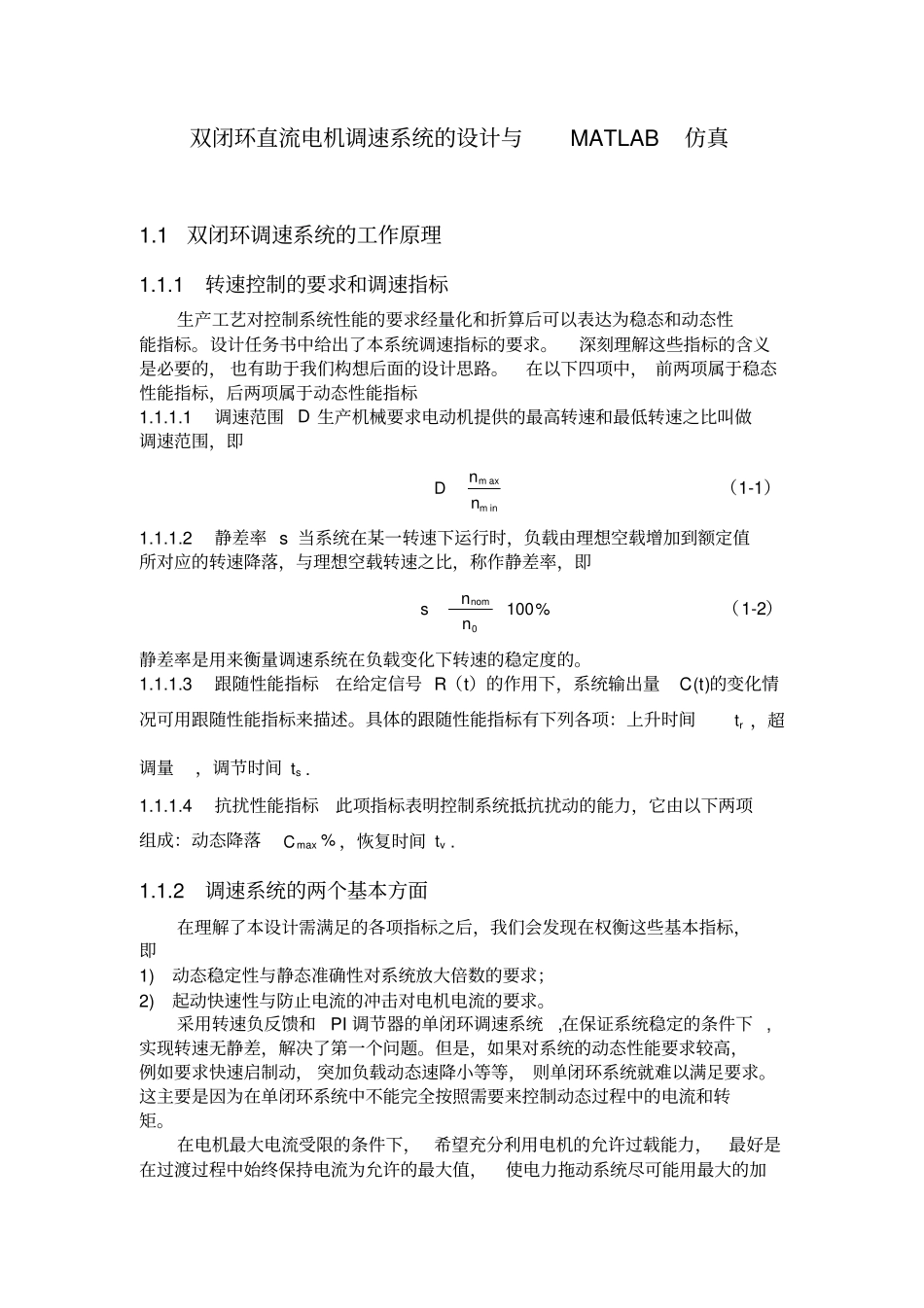
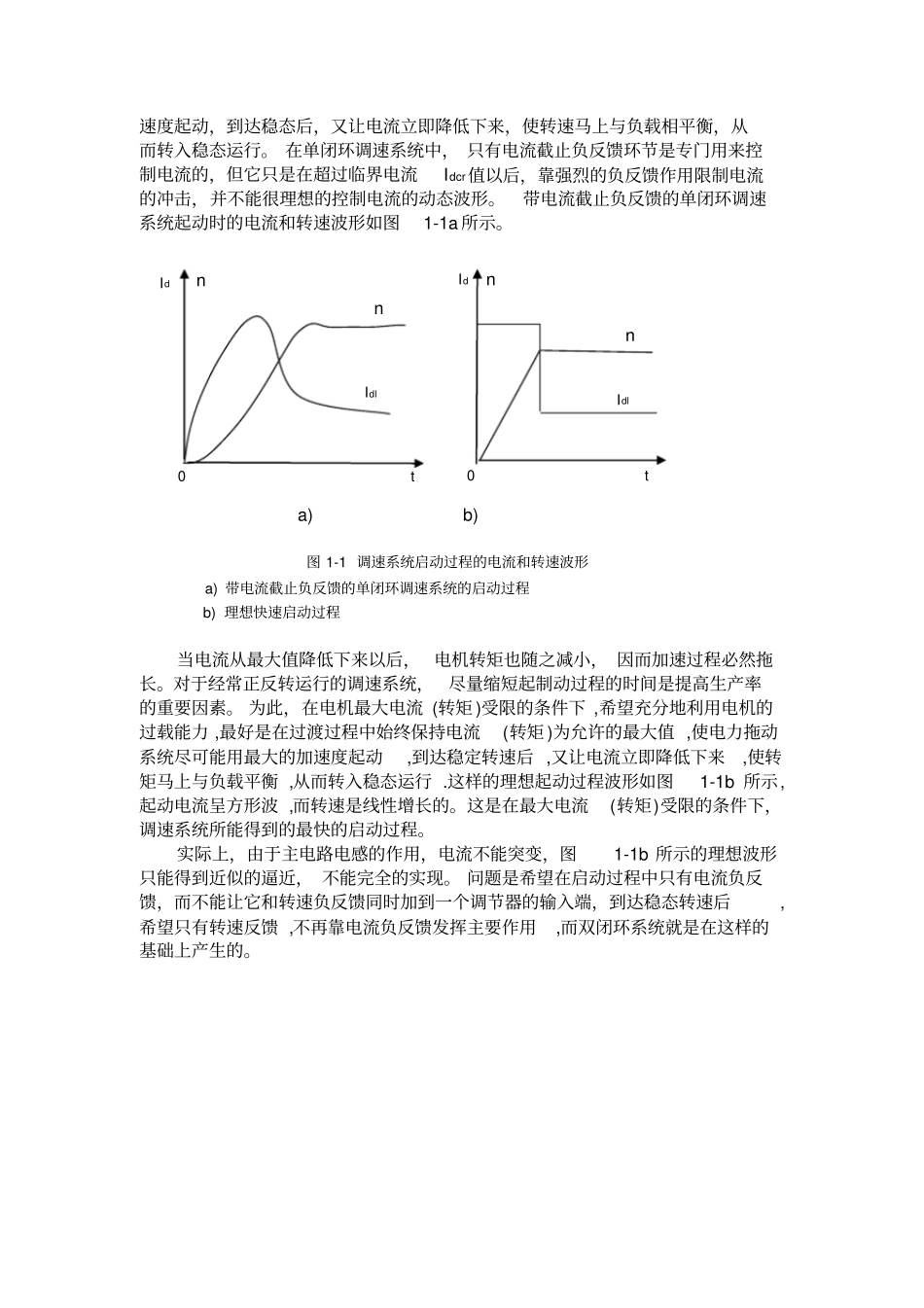
采用转速负反馈和PI 调节器的单闭环调速系统,在保证系统稳定的条件下 ,实现转速无静差,解决了第一个问题
但是,如果对系统的动态性能要求较高,例如要求快速启制动, 突加负载动态速降小等等, 则单闭环系统就难以满足要求
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程中的电流和转矩
在电机最大电流受限的条件下, 希望充分利用电机的允许过载能力,最好是在过渡过程中始终保持电流为允许的最大值,使电力拖动系