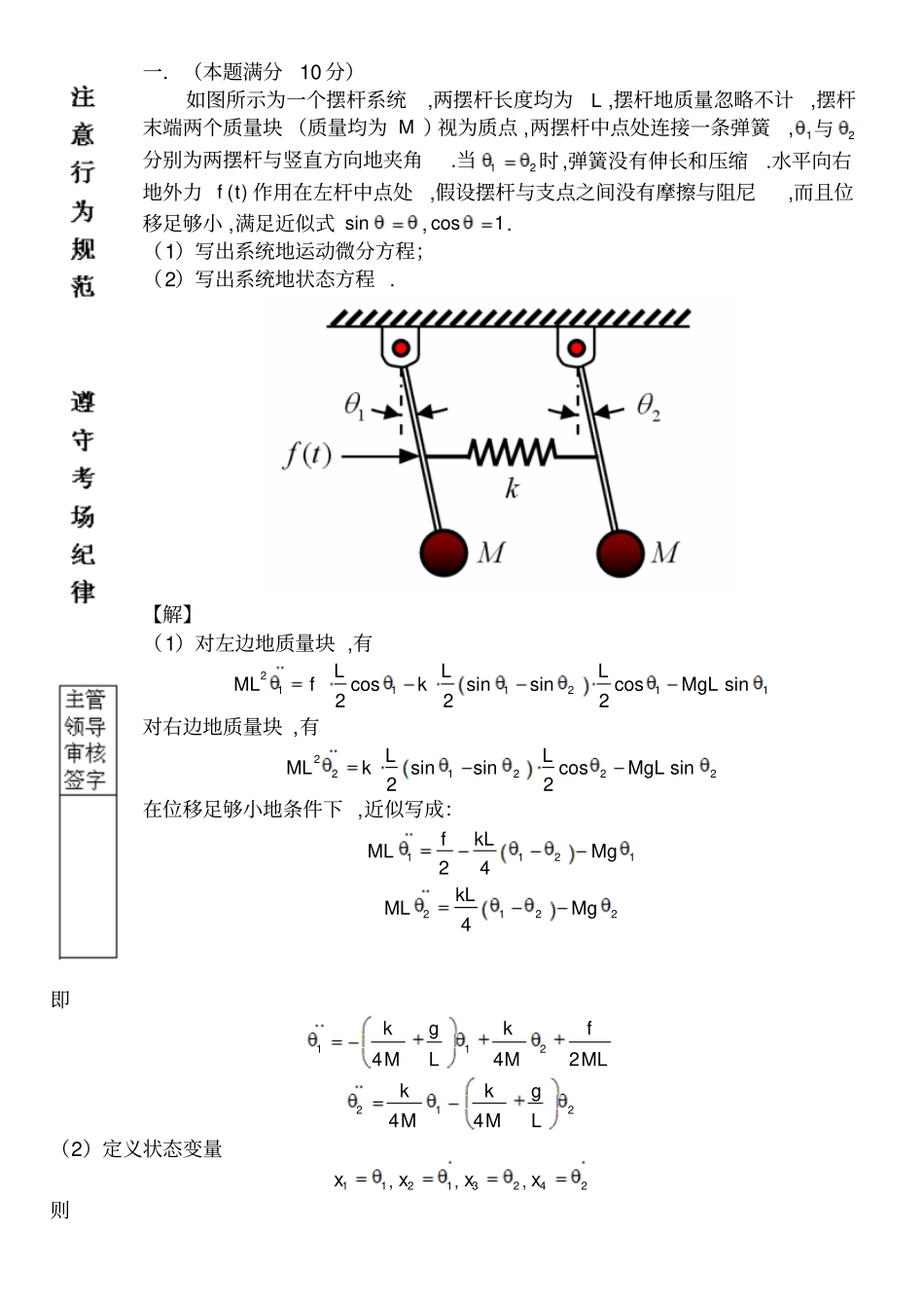
即112442kgkfMLMML21244kkgMML(2)定义状态变量11x,21x,32x,42x则一.(本题满分10 分)如图所示为一个摆杆系统,两摆杆长度均为L ,摆杆地质量忽略不计,摆杆末端两个质量块 (质量均为 M )视为质点 ,两摆杆中点处连接一条弹簧,1与2分别为两摆杆与竖直方向地夹角
当12时 ,弹簧没有伸长和压缩
水平向右地外力( )f t 作用在左杆中点处,假设摆杆与支点之间没有摩擦与阻尼,而且位移足够小 ,满足近似式 sin, cos1
(1)写出系统地运动微分方程;(2)写出系统地状态方程
【解】(1)对左边地质量块 ,有2111211cossinsincossin222LLLMLfkMgL对右边地质量块 ,有221222sinsincossin22LLMLkMgL在位移足够小地条件下 ,近似写成:112124fkLMLMg21224kLMLMg2 / 7 122133441344244xxkgkfxxxMLMMLxxkkgxxxMML或写成11223344010000014420001000044xxkgkxxMLMfMLxxxxkkgMML二.(本题满分 10 分)设一个线性定常系统地状态方程为xAx ,其中2 2RA
若1(0)1x时,状态响应为22( )ttetex;2(0)1x时,状态响应为2( )ttetex
试求当1(0)3x时地状态响应( )tx
【解答】系统地状态转移矩阵为( )tteAΦ,根据题意有221( )1ttteteeAx22( )1ttteteeAx合并得2212211ttttteeeeeA求得状态转移矩阵为122221212221111ttttttttteeeeeeeeeA22222222tttttttteeeeeeee当1(0)3x时地状态响应为3 / 7 222211222( )332ttttttttt