1 摘要: 智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途
智能电动车就是其中的一个体现
本次设计的简易智能电动车, 采用 STC89C52单片机作为小车的检测和控制核心;采用金属感应器TL-Q5MC来检测路上感应到的铁片,从而把反馈到的信号送单片机,使单片机按照预定的工作模式控制小车在各区域按预定的速度行驶,并且单片机选择的工作模式不同也可控制小车顺着黑色胶布循迹行驶;采用红外壁障测障碍物
采用 1602LCD实时显示小车行驶的时间,小车停止行驶后,显示小车行驶时间以及硬币的个数
本设计结构简单,较容易实现,但具有高度的智能化、人性化,一定程度体现了智能
关键词 :STC89C52 循迹红外壁障金属感应器 1602LCD 2 1
设计任务:设计并制作了一个智能电动车,其行驶路线满足所需的要求
1 要求:1
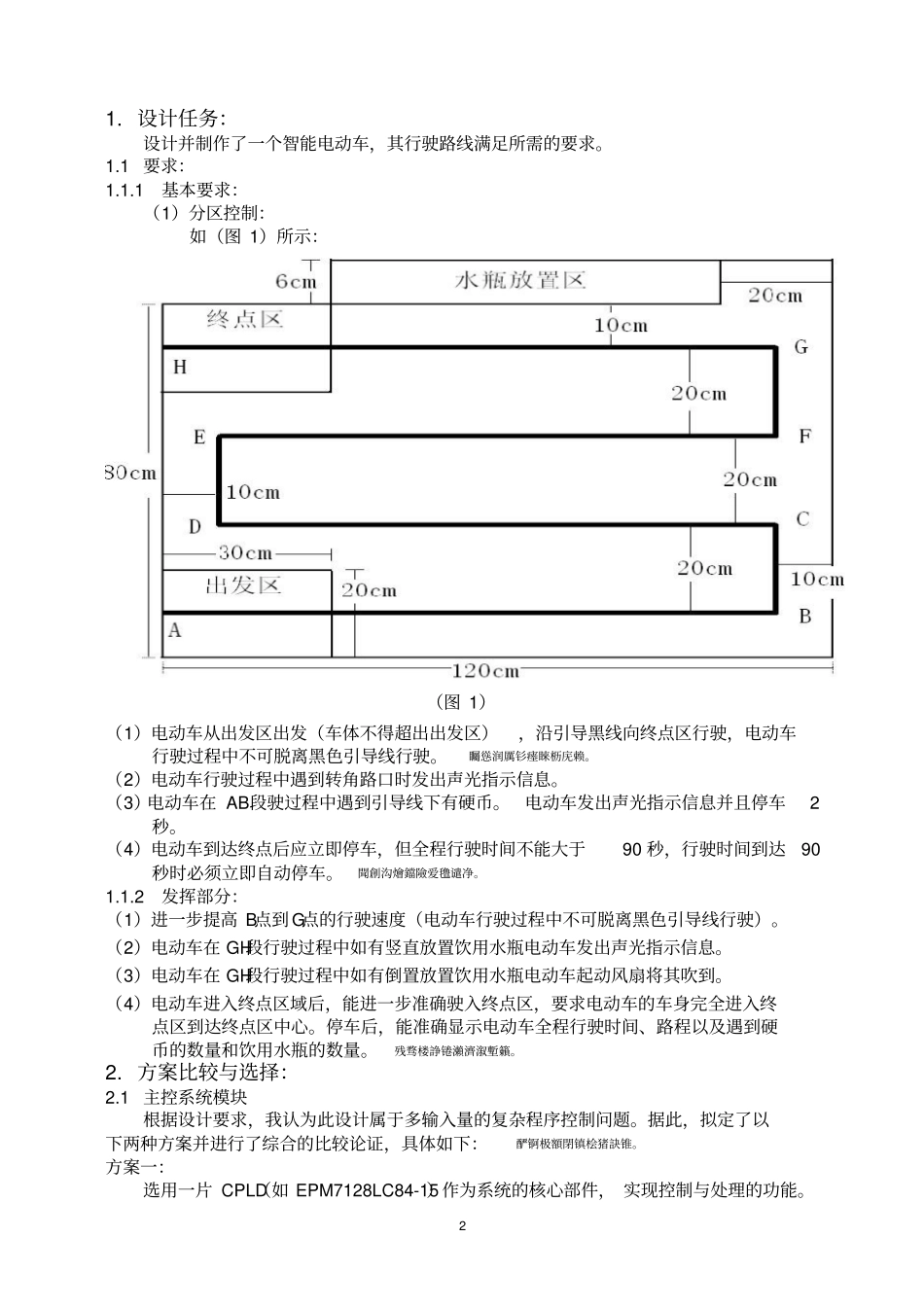
1 基本要求:(1)分区控制:如(图 1)所示:(图 1)(1)电动车从出发区出发(车体不得超出出发区),沿引导黑线向终点区行驶,电动车行驶过程中不可脱离黑色引导线行驶
矚慫润厲钐瘗睞枥庑赖
(2)电动车行驶过程中遇到转角路口时发出声光指示信息
(3)电动车在 AB段驶过程中遇到引导线下有硬币
电动车发出声光指示信息并且停车2秒
(4)电动车到达终点后应立即停车,但全程行驶时间不能大于90 秒,行驶时间到达90秒时必须立即自动停车
聞創沟燴鐺險爱氇谴净
2 发挥部分:(1)进一步提高 B点到 G点的行驶速度(电动车行驶过程中不可脱离黑色引导线行驶)
(2)电动车在 GH段行驶过程中如有竖直放置饮用水瓶电动车发出声光指示信息
(3)电动车在 GH段行驶过程中如有倒置放置饮用水瓶电动车起动风扇将其吹到
(4)电动车进入终点区域后,能进一步准确驶入终点区,要求电动车的车身