第五章 数据关联 数据关联是多传感器信息融合的关键技术,应用于航迹起始、集中式目标跟踪和分布式目标跟踪
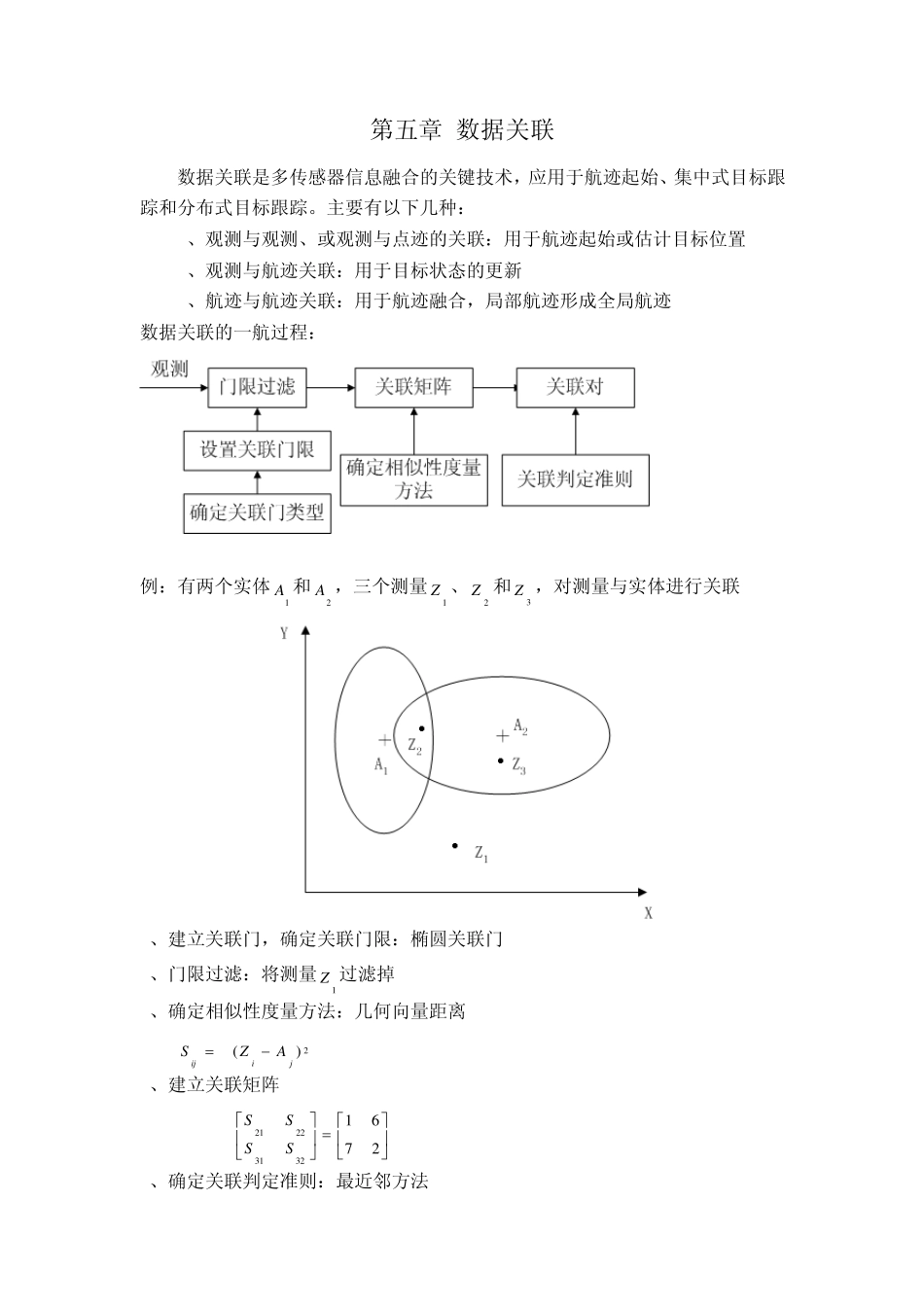
主要有以下几种: a、观测与观测、或观测与点迹的关联:用于航迹起始或估计目标位置 b、观测与航迹关联:用于目标状态的更新 c、航迹与航迹关联:用于航迹融合,局部航迹形成全局航迹 数据关联的一航过程: 例:有两个实体1A 和2A ,三个测量1Z 、2Z 和3Z ,对测量与实体进行关联 1、建立关联门,确定关联门限:椭圆关联门 2、门限过滤:将测量1Z 过滤掉 3、确定相似性度量方法:几何向量距离 2)(jiijAZS 4、建立关联矩阵 276132312221SSSS 5、确定关联判定准则:最近邻方法 6、形成关联对 12AZ 23AZ 一、关联门与门限:关联门通常有两种,矩形和椭圆形 椭圆门: GzzSzzdT)ˆ(ˆ12 位置:22122212121222121221001yxyxTyyxxyyxxyyxxd 位置速度:22122212221222122yxyxyyxxyyxxd G :关联门限,可由两种方法获取,一是最大似然法,另一种是2 分布法
2 分布法 2d 是 M个独立高斯分布随机变量平方和,它服从自由度为 M的2 概率分布,给出漏检率,查2 分布表得到门限G 二、相似度量方法 距离度量: 欧几里得距离:212)(ZY ,向量间的几何距离 加权欧氏距离:21)()(ZYWZYT City Block: )(ZY ,一阶明可夫斯基距离,也称 Manhatta 距离 明可夫斯基距离:PPZY1)(, P1 Mahalanobis距离:TZYRZY)()