微机控制技术微机控制技术内容提要一步进电机简介二步进电机原理介绍三步进电机的驱动原理四国内外发展概况与趋势一步进电机简介一步进电机简介☆步进电动机的定义:是一种专门用于速度和位置精确控制的特种电机,它旋转是以固定的角度(称为步距角)一步一步运行的,故称步进电机
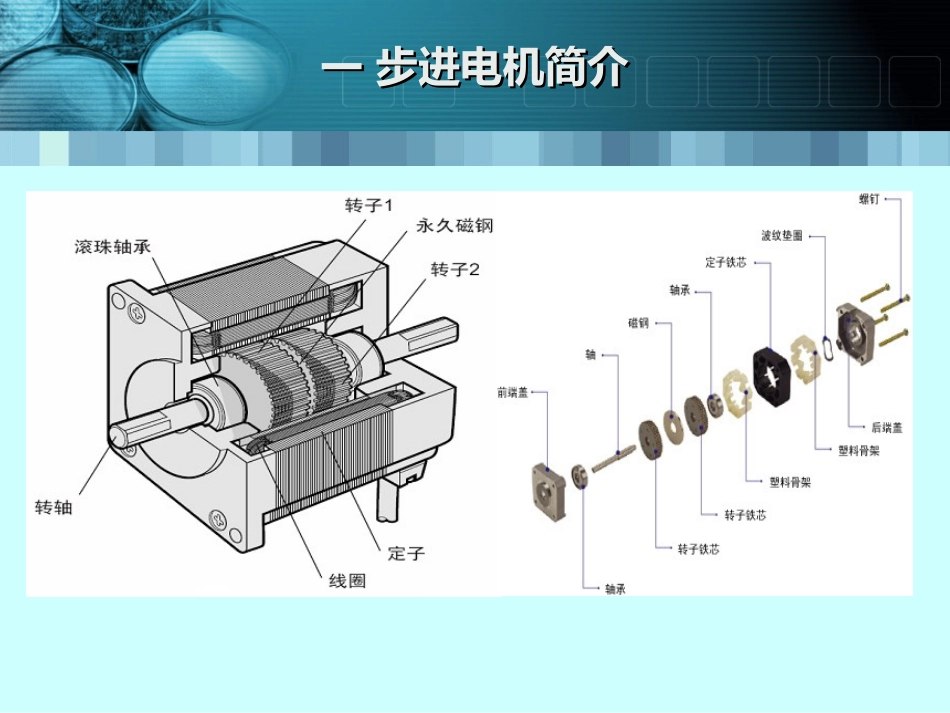
☆步进电动机构造:由转子(转子铁芯、永磁体、转轴、滚珠轴承),定子(绕组、定子铁芯),前后端盖等组成
最典型两相混合式步进电机的定子有8个大齿,40个小齿,转子有50个小齿;三相电机的定子有9个大齿,45个小齿,转子有50个小齿
微机控制技术步进电机的特点1
一般步进电机的精度为步距角的3-5%,且不累积;2
步进电机外表允许的最高温度取决于不同电机磁性材料的退磁点;3
步进电机的力矩会随转速的升高而下降
空载启动频率:即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转
低频振动特性:步进电动机以连续的步距状态边移动边重复运转
其步距状态的移动会产生1步距响应
微机控制技术☆步进电机的优点(1)与负载无关:不超载时步进电机能够按照设定的速度运行;(2)动态响应快:易于启动、停止和反转;(3)保持转矩:停止时能够自锁;(4)无累积误差:虽然步进电机每转动一步的角位移与标称的步距角具有一定的误差(3一5%),但是转动一周后累积的误差和为零
(5)步距角与环境无关:步进电机的固有步距角是由本身构造决定的,与温度、电压、电流等使用环境无关
(6)易于控制:只需控制脉冲的频率和个数,即可达到定位、调速目的
(7)价格低廉
☆步进电机的缺点:(l)低速转动时振动和噪声都比较大;(2)输出力矩随着转动速度的升高而降低;(3)启动频率不能太高,否则会堵转并伴随有呼啸声;(4)速度突变较大时存在丢步和过冲现象;(5)最高运动速度较低,且高速运转时输出力矩小;(6)开环控制,