实验十七 直流电机控制实验 一、 实验目的 1. 学习数字控制器的模拟化设计方法; 2. 学习数字 PID 控制器的设计方法; 3. 学习 PWM 控制理论; 4. 学习数字 PID 控制器在 DSP 上的实现方法
二、 实验设备 计算机,CCS 2
0 版软件,实验箱、DSP 仿真器、导线
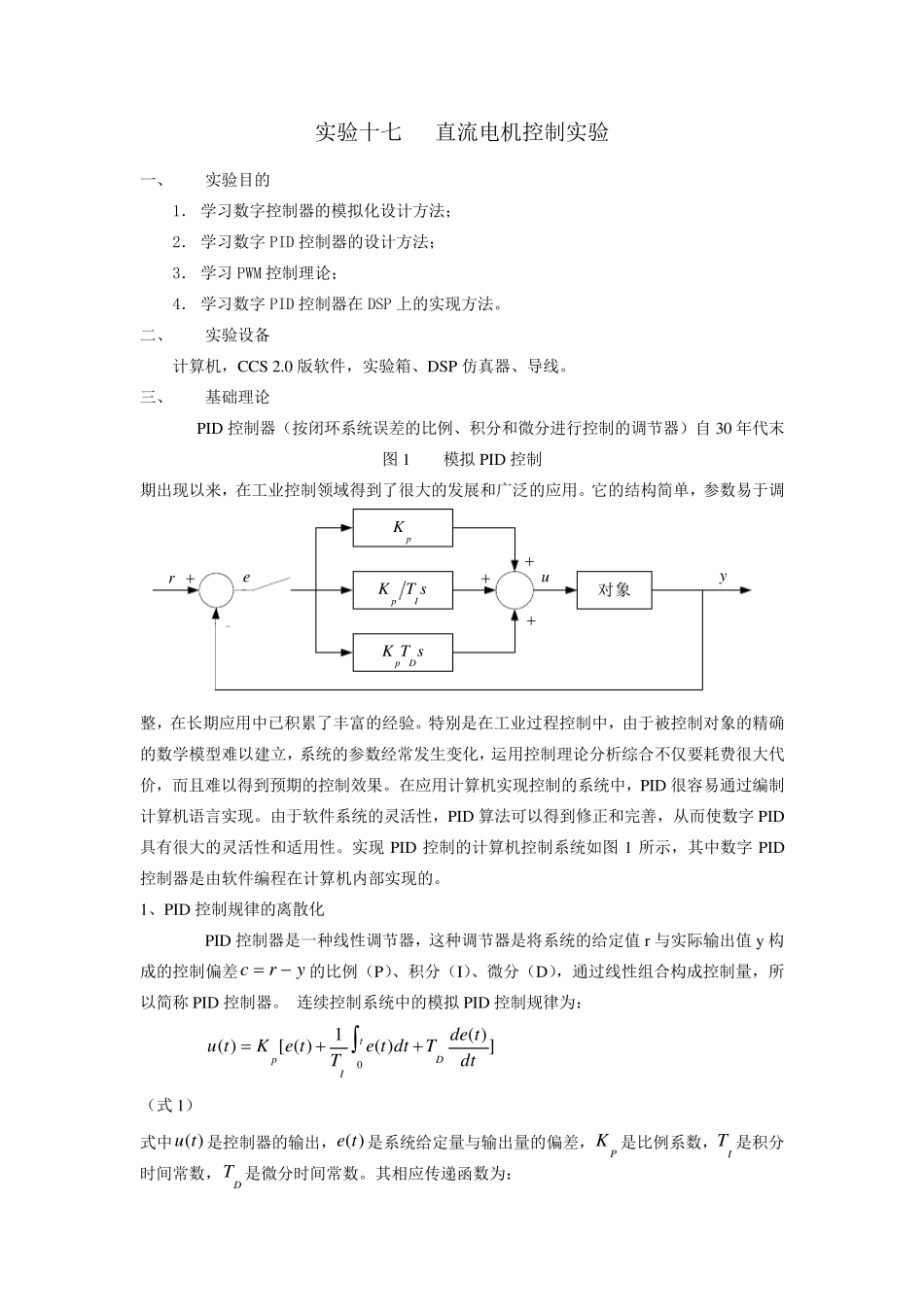
三、 基础理论 PID 控制器(按闭环系统误差的比例、积分和微分进行控制的调节器)自 30 年代末 图 1 模拟 PID 控制 期出现以来,在工业控制领域得到了很大的发展和广泛的应用
它的结构简单,参数易于调整,在长期应用中已积累了丰富的经验
特别是在工业过程控制中,由于被控制对象的精确的数学模型难以建立,系统的参数经常发生变化,运用控制理论分析综合不仅要耗费很大代价,而且难以得到预期的控制效果
在应用计算机实现控制的系统中,PID 很容易通过编制计算机语言实现
由于软件系统的灵活性,PID 算法可以得到修正和完善,从而使数字 PID具有很大的灵活性和适用性
实现 PID 控制的计算机控制系统如图 1 所 示 ,其 中数字 PID控制器是由软件编程在计算机内 部 实现的
1、PID 控制规 律 的离 散 化 PID 控制器是一种 线性调节器,这 种 调节器是将 系统的给 定 值 r 与 实际 输 出值 y 构成 的控制偏 差yrc的比例(P)、积分(I)、微分(D),通过线性组 合构成 控制量 ,所以简称 PID 控制器
连 续 控制系统中的模拟 PID 控制规 律 为 : ])()(1)([)(0dttdeTdtteTteKtuDtIp (式 1) 式 中)(tu是控制器的输 出,)(te是系统给 定 量 与 输 出量 的偏 差,PK 是比例系数,IT 是积分时 间 常数,DT 是微分时 间 常数
其 相 应传 递 函 数为 : pKsTKIpsTKDp对象rey