SIFT 特征点匹配算法 基于SIFT 方法的图像特征匹配可分为特征提取和特征匹配两个部分,可细化分为五个部分: ① 尺度空间极值检测(Scale-space extrema detection); ② 精确关键点定位(Keypoint localization) ③ 关键点主方向分配(Orientation assignment) ④ 关键点描述子生成(Keypoint descriptor generation) ⑤ 比 较 描 述 子 间 欧 氏 距 离 进 行 匹配( Comparing the Euclidean distance of the descriptors for matching) 1
1 尺度空间极值检测 特征关键点的性质之一就是对于尺度的变化保持不变性
因此我们所要寻找的特征点必须具备的性质之一,就是在不同尺度下都能被检测出来
要达到这个目的,我们可以在尺度空间内寻找某种稳定不变的特性
Koenderink 和Lindeberg 已经证明,变换到尺度空间唯一的核函数是高斯函数
因此一个图像的尺度空间定义为:( , ,)L x y ,是由可变尺度的高斯函数( , ,)G x y 与输入图像( , )I x y 卷积得到,即: ),(),,(),,(yxIyxGyxL (1
1) 其中:2222/)(221),,(yxeyxG 在实际应用中,为了能相对高效地计算出关键点的位置,建议使用的是差分高斯函数(difference of Gaussian)( , ,)D x y
其定义如下: ),,(),,(),()),,(),,((),,(yxLkyxLyxIyxGkyxGyxD (1
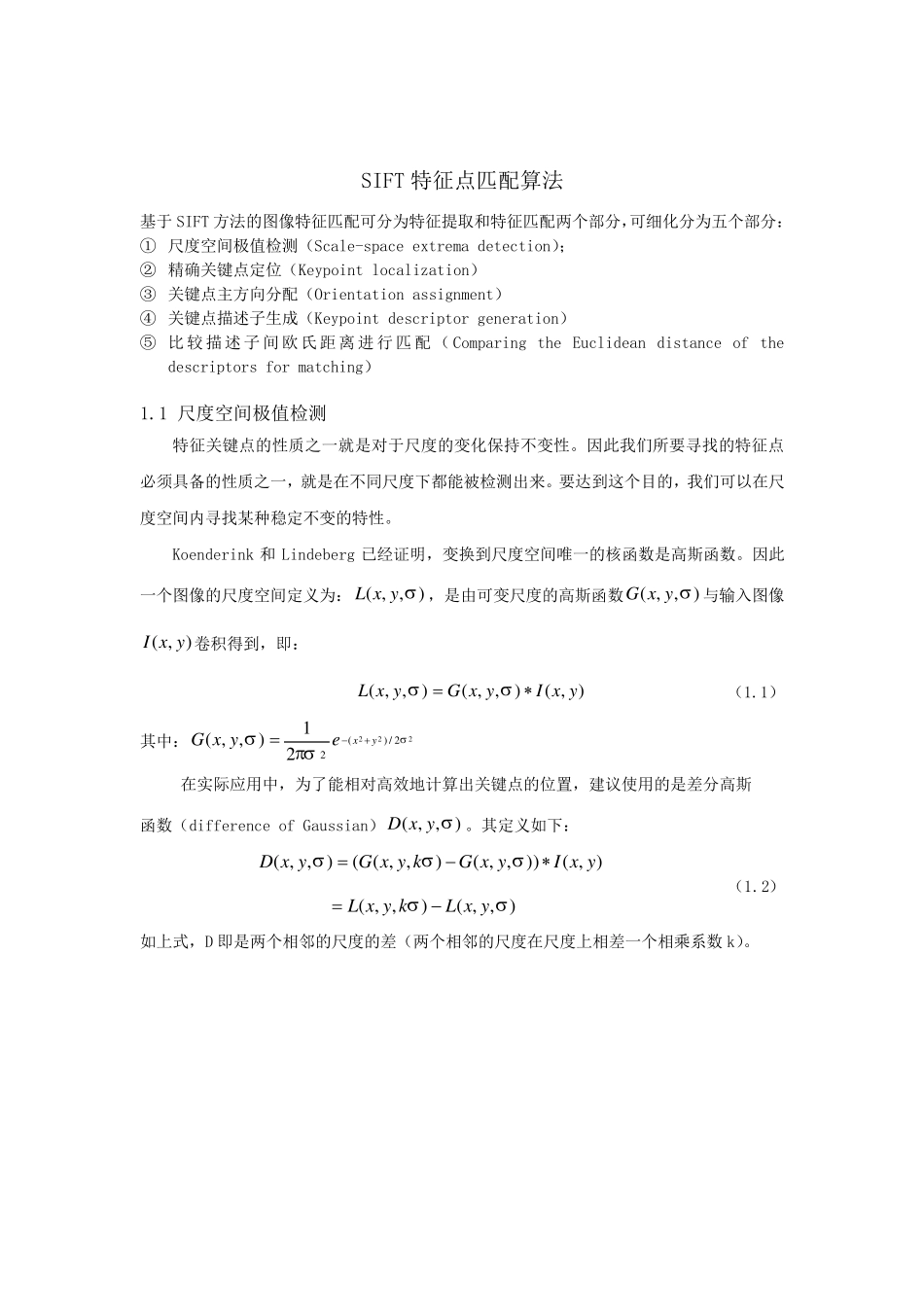
2) 如上式,D 即是两个相邻的尺度的差(两个相邻的尺度在尺度上相差一个相乘系数 k)