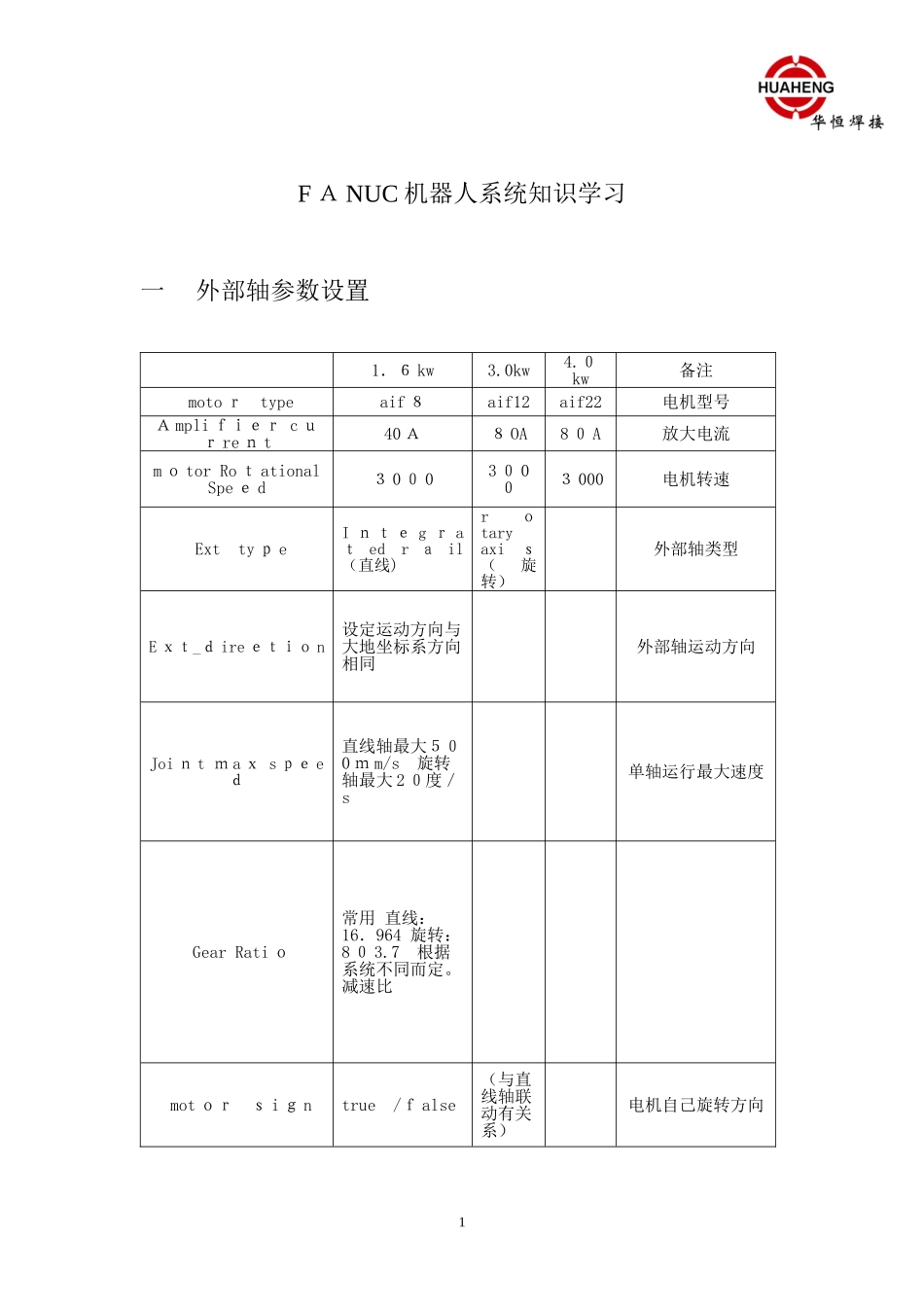
FANUC机器人系统知识学习一外部轴参数设置1.6kw3
0kw备注motortypeaif8aif12aif22电机型号Amplifiercurrent40A8OA80A放大电流motorRotationalSpeed300030003000电机转速ExttypeIntegratedrail(直线)rotaryaxis(旋转)外部轴类型Ext_direetion设定运动方向与大地坐标系方向相同外部轴运动方向Jointmaxspeed直线轴最大500mm/s旋转轴最大20度/s单轴运行最大速度GearRatio常用直线:16.964旋转:803
7根据系统不同而定
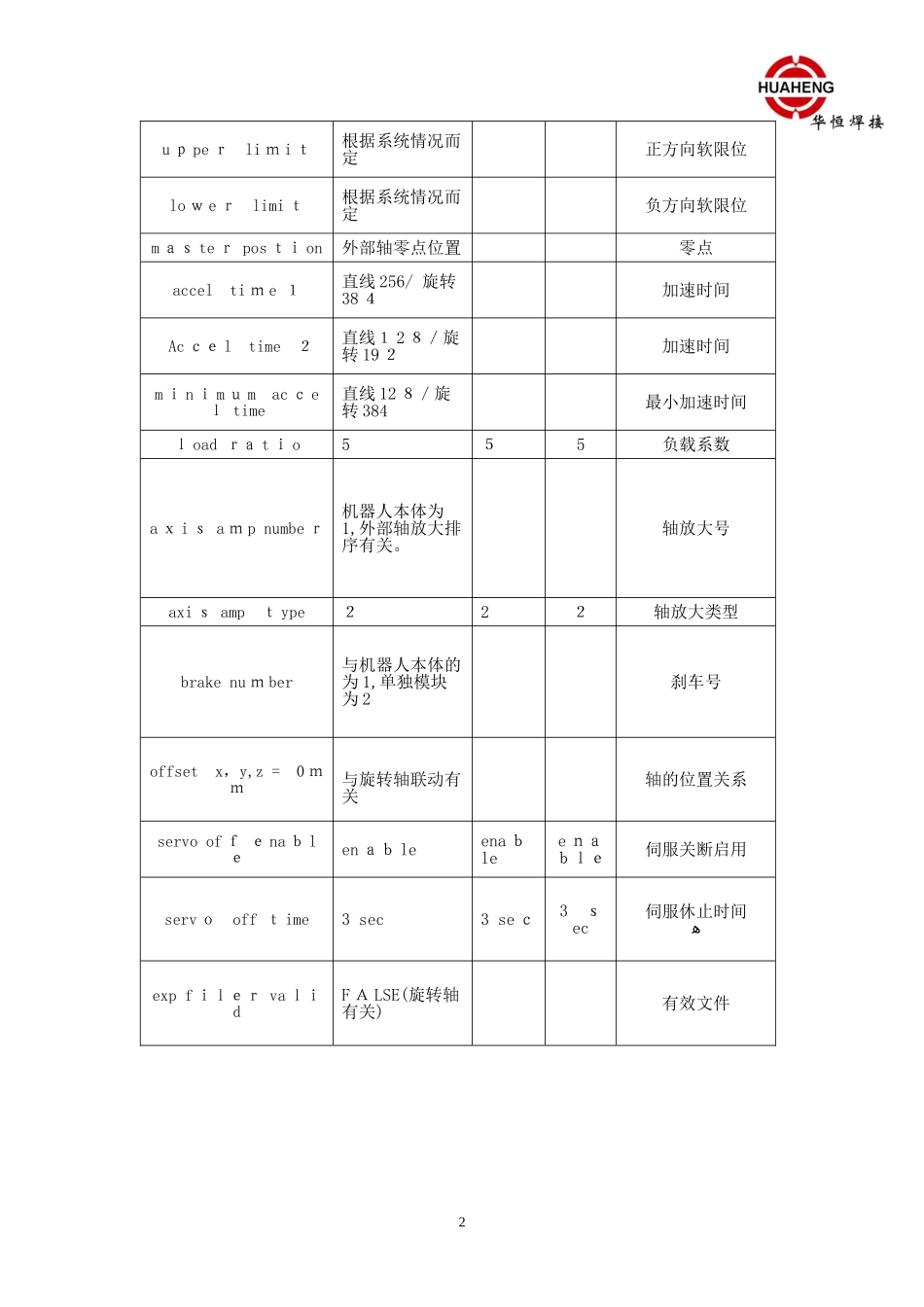
减速比motorsigntrue/false(与直线轴联动有关系)电机自己旋转方向1upperlimit根据系统情况而定正方向软限位lowerlimit根据系统情况而定负方向软限位masterpostion外部轴零点位置零点acceltime1直线256/旋转384加速时间Acceltime2直线128/旋转192加速时间minimumacceltime直线128/旋转384最小加速时间loadratio555负载系数axisampnumber机器人本体为1,外部轴放大排序有关
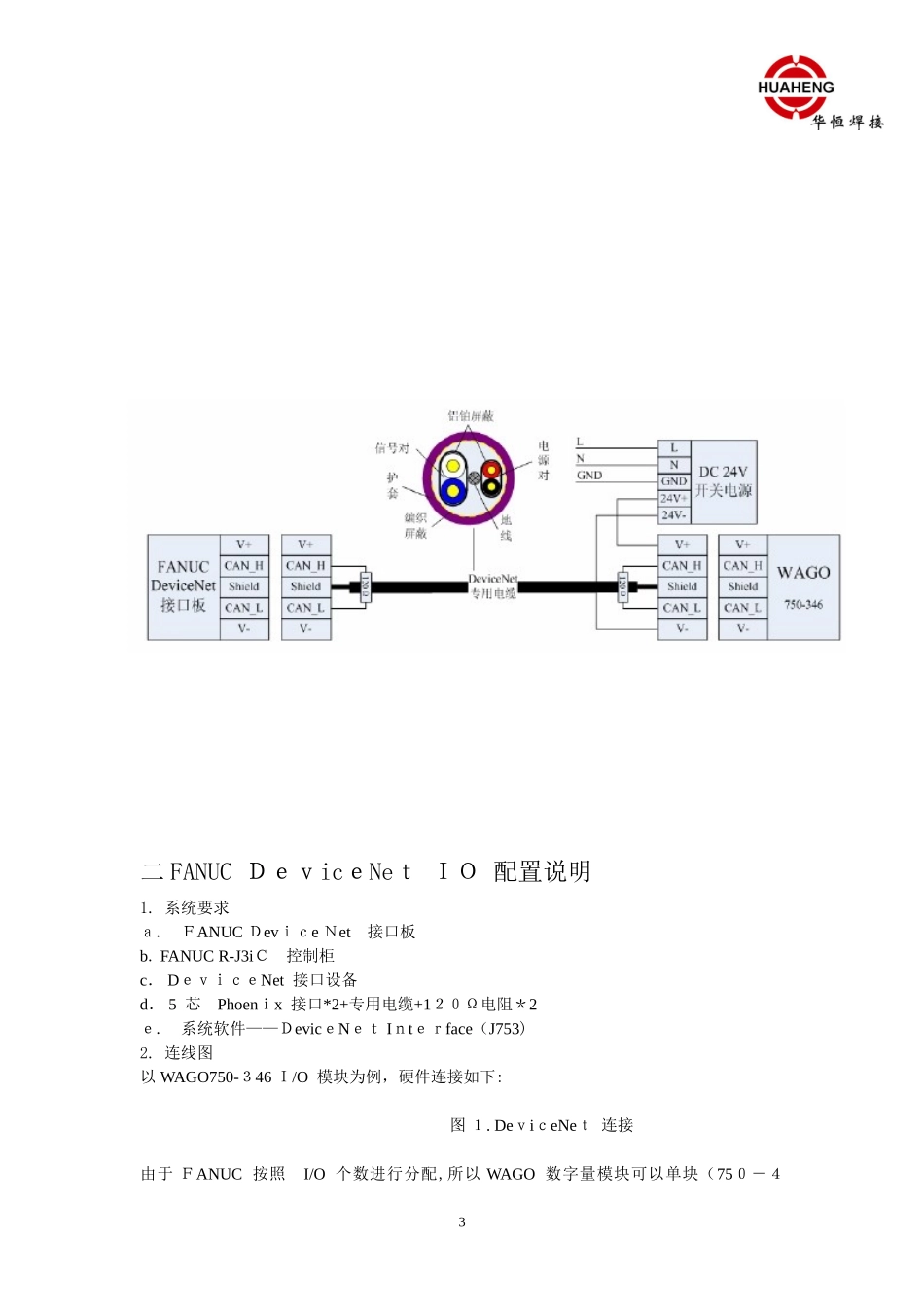
轴放大号axisamptype222轴放大类型brakenumber与机器人本体的为1,单独模块为2刹车号offsetx,y,z=0mm与旋转轴联动有关轴的位置关系servooffenableenableenableenable伺服关断启用servoofftime3sec3sec3sec伺服休止时间ﻫexpfilervalidFALSE(旋转轴有关)有效文件2二FANUCDeviceNetIO配置说明1
FANUCDeviceNet接口板b
FANUCR-J3iC控制柜c.DeviceNet接口设备d.5芯Phoen