嵌入式运动控制器在网络化交流伺服系统中的应用 一个多轴运动控制系统由高阶的运动控制器(motioncontroller)与低阶的伺服驱动器(servodriver)所组成,运动控制器负责运动控制命令译码、各个位置控制轴彼此间的相对运动、加减速轮廓控制等等,其主要关键在于降低整体系统运动控制的路径误差;伺服驱动器负责伺服电机的位置控制,主要关键在于降低伺服轴的追随误差
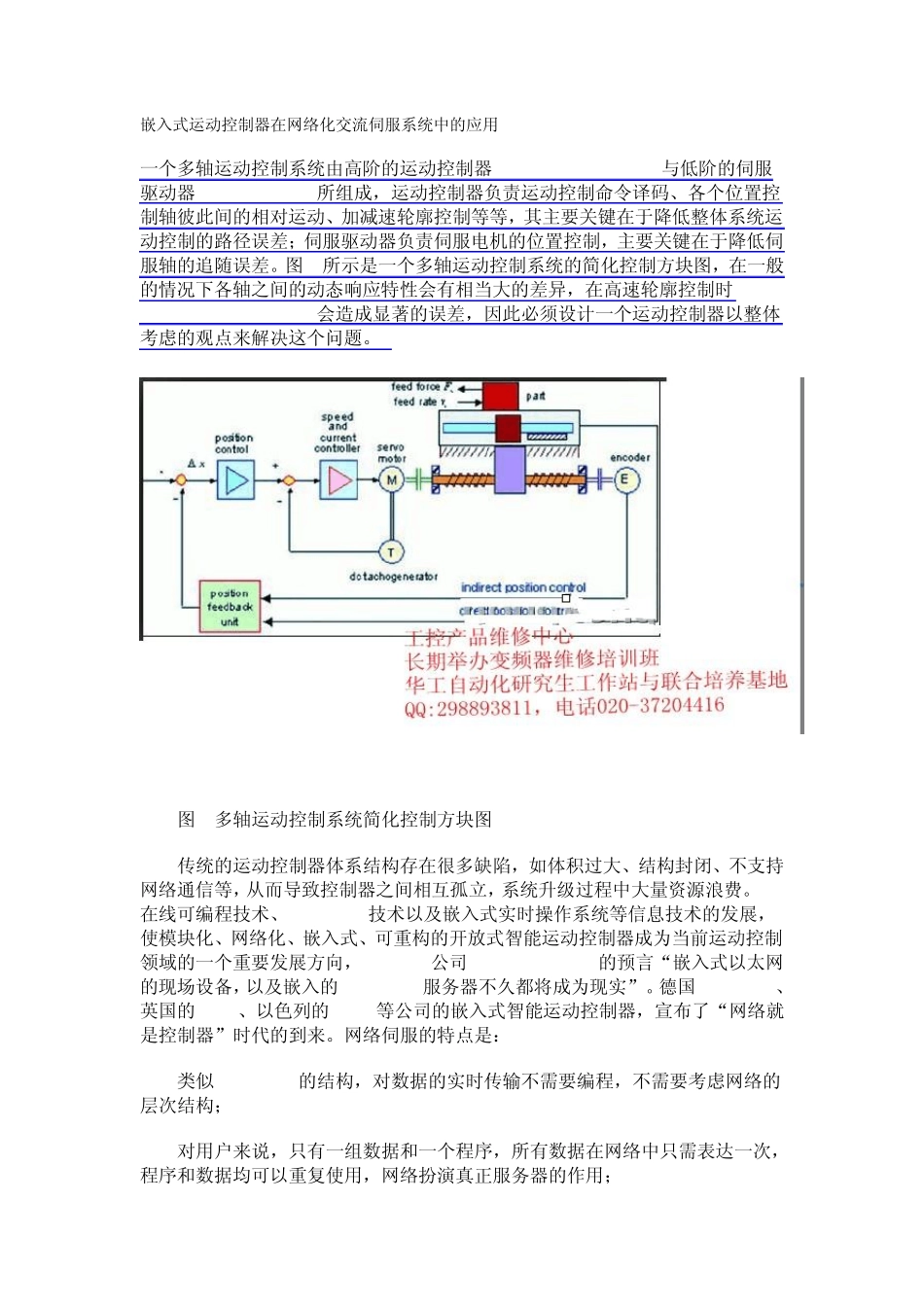
图 1所示是一个多轴运动控制系统的简化控制方块图,在一般的情况下各轴之间的动态响应特性会有相当大的差异,在高速轮廓控制时(contouringcontrol)会造成显著的误差,因此必须设计一个运动控制器以整体考虑的观点来解决这个问题
图 1多轴运动控制系统简化控制方块图 传统的运动控制器体系结构存在很多缺陷,如体积过大、结构封闭、不支持网络通信等,从而导致控制器之间相互孤立,系统升级过程中大量资源浪费
ISP在线可编程技术、Internet技术以及嵌入式实时操作系统等信息技术的发展,使模块化、网络化、嵌入式、可重构的开放式智能运动控制器成为当前运动控制领域的一个重要发展方向,Siemens公司HorstKohlbert的预言“嵌入式以太网的现场设备,以及嵌入的 Internet服务器不久都将成为现实”
德国 JetterAG、英国的 Trio、以色列的 ELMO等公司的嵌入式智能运动控制器,宣布了“网络就是控制器”时代的到来
网络伺服的特点是: 类似 Internet的结构,对数据的实时传输不需要编程,不需要考虑网络的层次结构; 对用户来说,只有一组数据和一个程序,所有数据在网络中只需表达一次,程序和数据均可以重复使用,网络扮演真正服务器的作用; 可连接到Internet,实现整个工厂全球化联网; 以太网既是连接到各种智能模块的系统总线,又是连接现场设备的现场总线
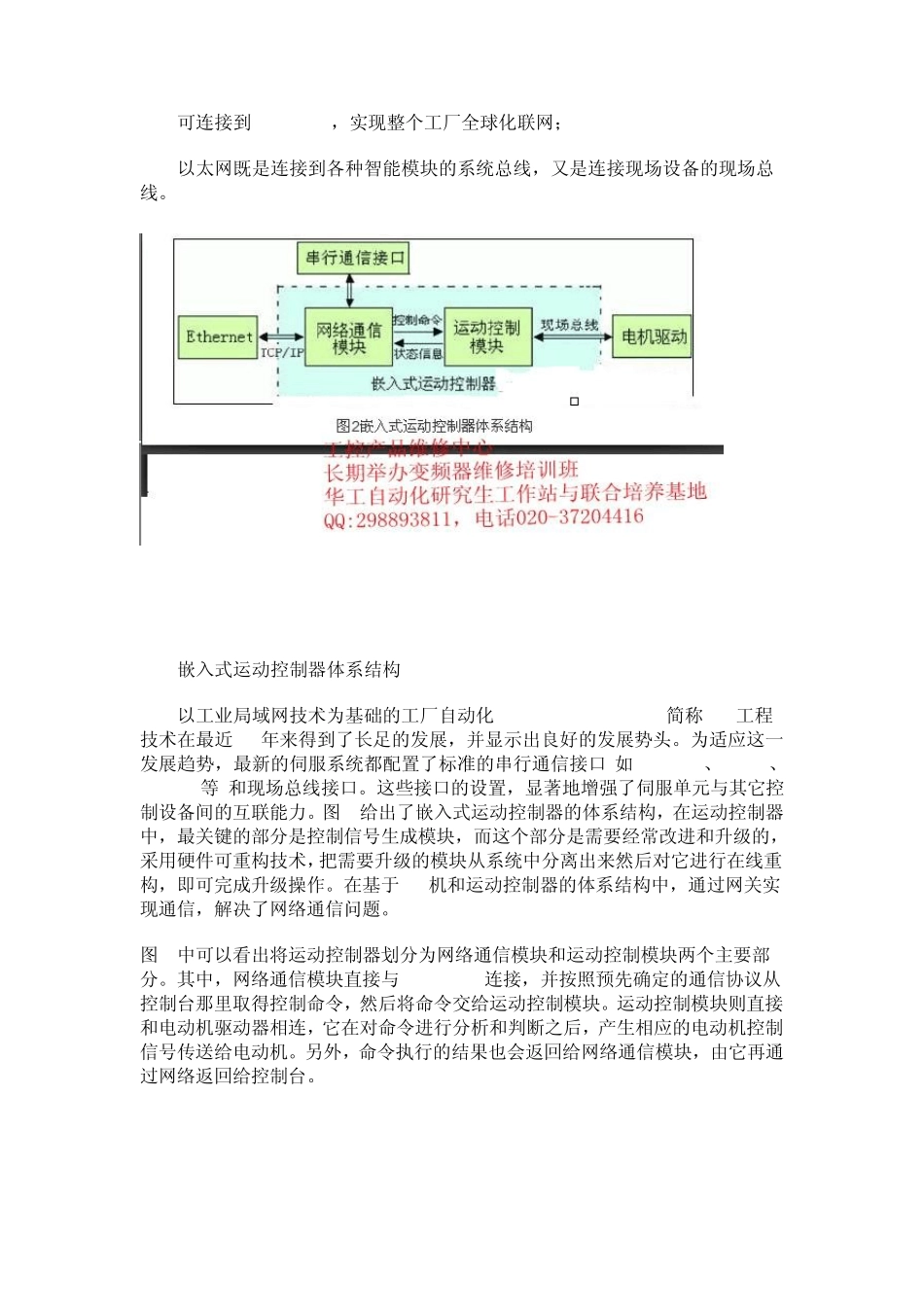
嵌入式运动控制器体系结构 以工业局域网技术