外文翻译---新型二自由度平动并联机器人的结构和运动学分析

1机械设计基础第三章平面机构运动简图及自由度班级:学号:姓名:一、填空题1.从机构结构观点来看,任何机构是由_________、_________、___...
摘要在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,...
四自由度上下料机械手结构设计及机构精度研究中期进度报告目录一绪论.....................................................................

多自由度铝合金机械手的设计与实现作者姓名议一议专业机械设计制造及其自动化指导教师姓名意义i专业技术职务讲师目录摘要……………………...

郑州轻工业学院轻工职业学院(河南工业大学)专科毕业设计(论文)题目四自由度多用途气动机器人结构设计及控制实现学生姓名赵满丽专业班级自动...
摘要机器人是一种能够进行编程并在自动控制下执行某些操作和移动作业任务的机械装置。而机械臂作为机器人最主要的执行机构,是一个十分复杂...
目录目录.........................................................1文摘.........................................................3Ab...
基于PLC的四自由度电动机械手的控制设计摘要:所介绍的电动机械手由电控机械手、yz轴丝杠组、手转动机构、旋转底盘等机械部分组成,在PLC控...
2012届本科毕业论文基于Pro/E的六自由度机械手的仿真学生姓名:所在院(系):机电学院所学专业:机械设计制造及其自动化导师姓名:完成时...
多自由度力觉辅助远程康复训练机械臂设计:高磊,曹丹,曹群,李煊鹏,赵马泉指导教师:宋爱国,崔建伟(东南大学仪器科学与工程系,南京21...
高维规范形理论及其在多自由度非线性机械系统中的应用摘要在中小跨径及一般大跨径桥梁中,预应力混凝土连续梁桥占有重要的地位,其设计规范...
多自由度力觉辅助远程康复训练机械臂摘要:多自由度力觉辅助远程康复训练机械臂的设计采用并行连杆机构。这种机械结构的优点是易于控制、机...
100KG四自由度码垛机器人底座设计及分析(……,…….,……..,…….)摘要:本文主要设计和研究了一个抓重为100KG的四自由度的码垛机器人...
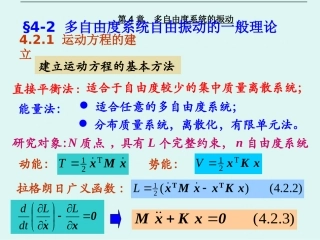
第4章多自由度系统的振动§4-2多自由度系统自由振动的一般理论4.2.1运动方程的建立建立运动方程的基本方法直接平衡法:适合于自由度较少的集...
RBT-6T/S01S桌面型串联关节式机器人实验指导书哈尔滨工业大学博实精密测控有限责任公司哈尔滨工业大学博实精密测控有限责任公司目录实验1机...

六自由度模块化机器人实验报告指导老师:团队成员:六自由度模块化机器人实验报告绪论一、实验课程简介六自由度工业机器人具有高度的灵活性...
机器人技术基础结业论文六自由度机械臂的运动设计姓名:彭小波学号:11004020121班级:110040201学院:机械工程学院指导老师:王黎明2013.1...
摘要机器人在现代工业生产制造领域的应用越来越普遍。机器人技术是当今社会国家高新技术水平的重要体现。六自由度工业机器人以其较大的工作...
摘要机器人是一种集机械、电子、传感技术、控制技术等多种现代技术于一体的机电一体化产品。进入80年代,随着自动化生产流水线以及柔性生产...