第1页共26页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共26页说明书机器人服装触觉传感信息融合数据处理方法技术...
无标定视觉伺服在机器人跟踪多特征点目标的应用宋平康庆生孟正大东南大学摘要:介绍了一种眼在手上的机器人3D视觉跟踪多特征点目标的无标定...
第1页共37页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共37页摘要在当今大规模制造业中,企业为提高生产效率,保...
本科毕业设计(论文)题目未知环境中多机器人通信技术研究姓名杜帅锋专业通信工程学号201251004指导教师邵杰郑州科技学院信息工程学院二一...
1绪论1.1引言人们生活水平随着社会的快速发展日益提高,同时,汽车工业的迅速发展,使汽车进入小康家庭不再是人们的幻想。汽车的出现,不但...

救援探测机器人发展现状目前,矿井救灾方式只是根据事故的类型确定救灾的方案,一般救护人员无法进入危险区域,只能通过提升绞车移动式风车...
2015中国工程机器人大赛暨国际公开赛(RoboWork)机器人搬运工程技术报告参赛学校:华北电力大学队伍名称:冲队参赛队员:黄瑞托吴秋淑李梦...

ee输电线路除冰机器人机械部分设计作者:e(e)指导老师:e[摘要]针对现在有输电线路除冰效率低下、存在严重安全隐患、运行不平稳的特点,...
第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共8页西南交通大学机器人协会章程序言西南交通大学机器人协...

救援探测机器人发展现状目前,矿井救灾方式只是根据事故的类型确定救灾的方案,一般救护人员无法进入危险区域,只能通过提升绞车移动式风车...
第1页共8页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共8页青少年机器人竞赛机器人工程设计项目申报书项目名称:...

目录第一章综述第二章工程概况第三章施工总体部署及施工段划分第四章施工进度计划和各阶段进度的保证措施及承诺第五章劳动力和材料投入计划...

目录第1章序言21.1双足机器人现状21.2技能综合训练意义21.3技能训练的内容2第2章元件选择、结构设计32.1元件选择32.2结构设计三维设计图42....

目录第1章序言.........................................................................................................21.1双足机器...

基于单片机的自动巡线轮式机器人控制系统设计摘要:设计了一种自动巡线轮式行走机器人控制系统,采用AT89S52型单片机作为主控CPU,外加一个...
第1页共47页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共47页1引言1.1移动机器人机械臂的研究意义及目的本文以实...
第1页共4页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共4页西南交通大学第二届“实践杯”机器人大赛规则I比赛主...
第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共6页第十届机器人竞赛创意比赛成绩公示(小学组)序号项目...
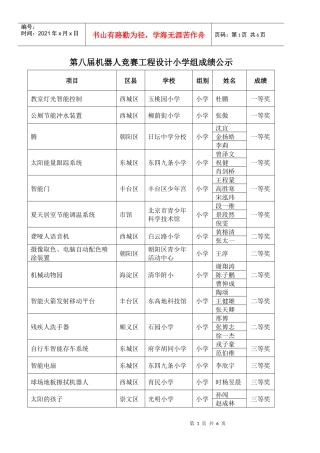
第1页共6页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共6页第八届机器人竞赛工程设计小学组成绩公示项目区县学校...

东风一中高中生智能机器人班C语言上机试题1-2求两数之和。#include