第五章 例5 -1 已知一控制系统结构图如图5-61 所示,当输入r(t) = 2sint 时,测得输出c(t)=4sin(t45),试确定系统的参数 ,n
解 系统闭环传递函数为 2222)(nnnsss 系统幅频特性为 22222224)()(nnnj 相频特性为 222arctan)(nn 由题设条件知 c(t) = 4sin( t 45) =2 A(1) sin(t + (1)) 即 122222224)()1(nnnA 24)1(22222nnn 1222arctan)1(nn 4512arctan2nn 整理得 ]4)1[(422224nnn 122 nn 解得 n = 1
244 = 0
22 例5 -2 1 系统的传递函数为 )1)(1()(212sTsTsksG 试绘制系统概略幅相特性曲线
解 (1) 组成系统的环节为两个积分环节、两个惯性环节和比例环节
(2) 确定起点和终点 )1)(1()()1()(222221221221TTTTjkTTkjG )]([lim0jGRe )]([lim0jGIm 由于 Re[G(j)]趋于的速度快,故初始相角为180
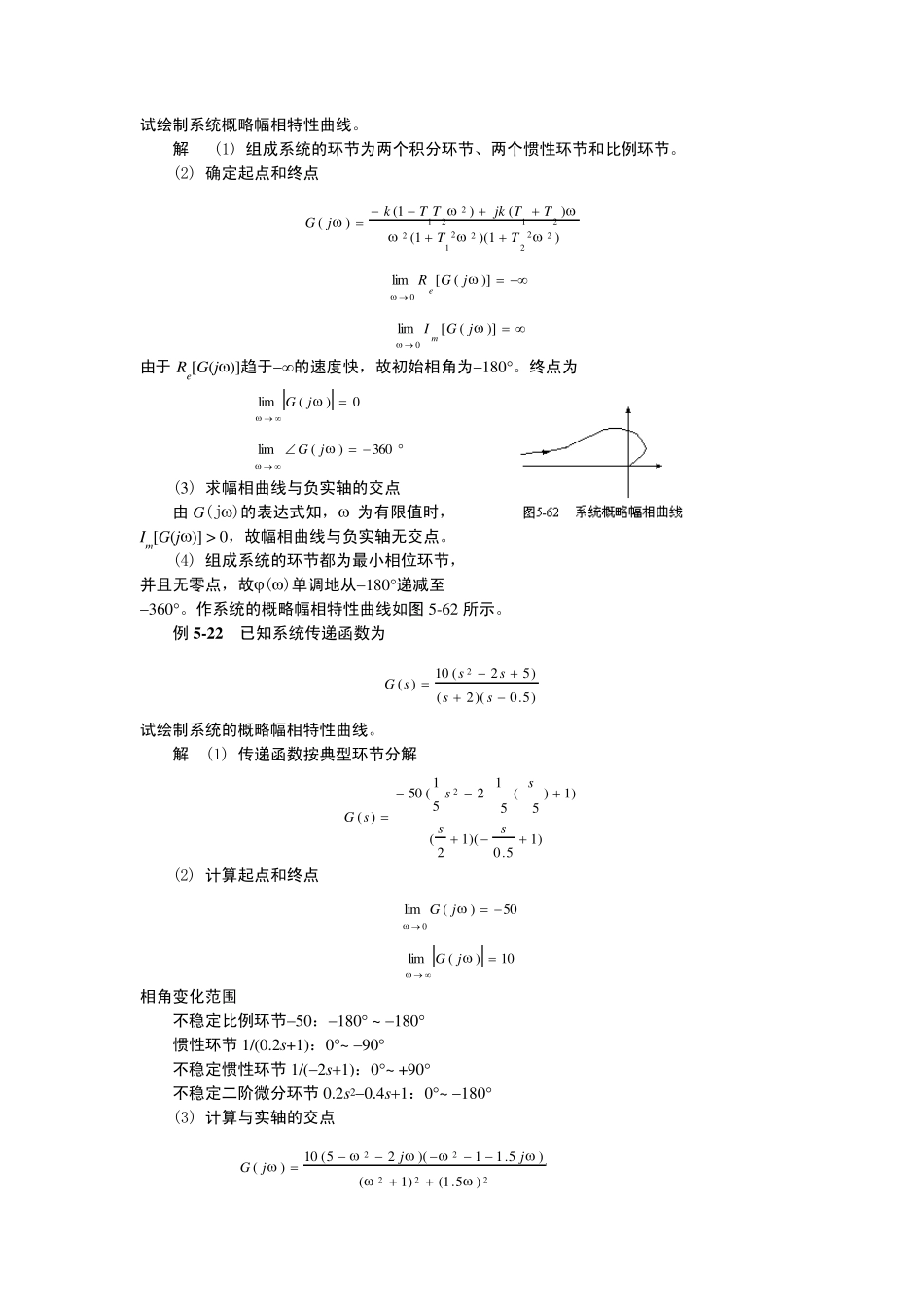
终点为 0)(limjG 360)(limjG (3) 求幅相曲线与负实轴的交点 由 G(j)的表达式知, 为有限值时, Im[G(j)] > 0,故幅相曲线与负实轴无交点
(4) 组成系统的环节都为最小相位环节, 并且无零点,故()单调地从180递减至 360
作系统的概略幅相特性曲线如图 5-62 所示