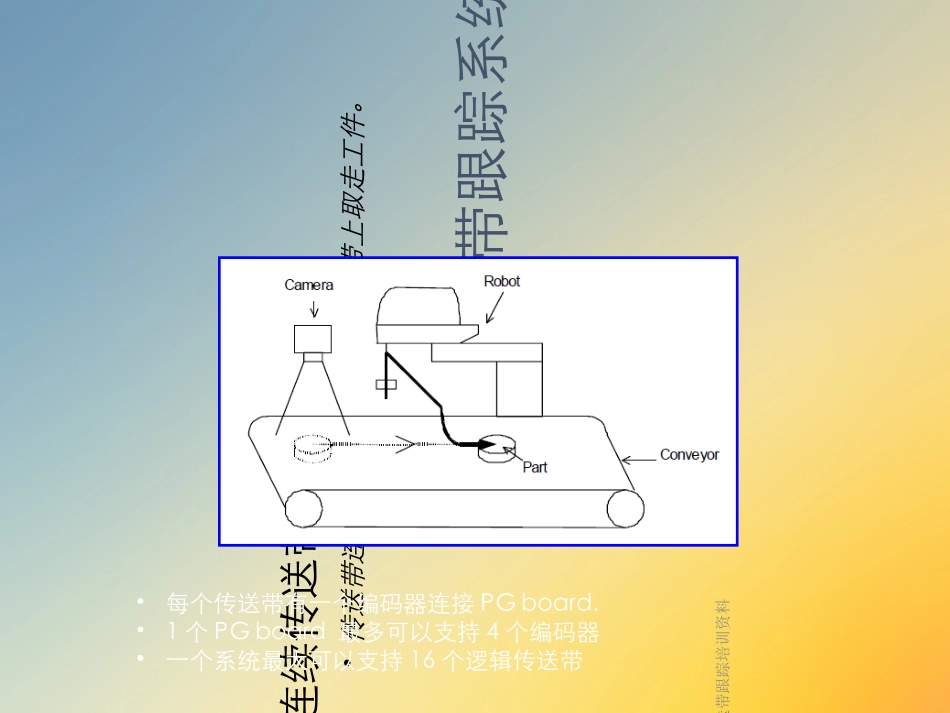
24/10/19爱普生传送带跟踪培训资料爱普生传送带跟踪培训资料爱普生传送带跟踪培训资料传送带跟踪系统的类型•连续传送带跟踪•传送带连续移动,机器人从传送带上取走工件
•每个传送带有一个编码器连接PGboard
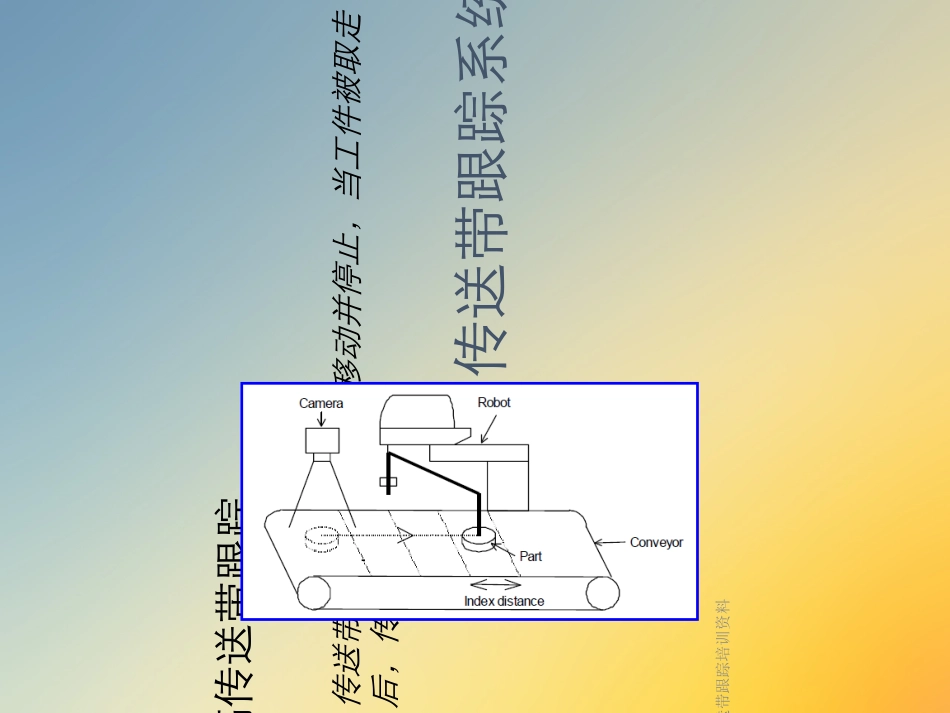
•1个PGboard最多可以支持4个编码器•一个系统最大可以支持16个逻辑传送带爱普生传送带跟踪培训资料传送带跟踪系统的类型•间隔传送带跟踪•传送带根据指定的距离移动并停止,当工件被取走后,传送带继续移动
爱普生传送带跟踪培训资料不抓取的区域传送带速度NopickzoneNopickzone•粉红色的区域是传送带加减速的区域•该区域传送带不抓取工件,如果命令机器人在该区域抓取精度会很低爱普生传送带跟踪培训资料概览传送带类型直形/圆形/多传送带硬件触发视觉传感器触发方式通过软件通过硬件通过硬件校正方法视觉传送带校准(直形)视觉传送带校准(圆形)传感器传送带校准(直形)传感器传送带校准(圆形)爱普生传送带跟踪培训资料传送带触发方式软件触发硬件触发•软件触发只需要连接号编码器即可,通过cnv_trigger实现
•硬件触发比较简单且可以同时触发相机和传送带,且精度较高
爱普生传送带跟踪培训资料硬件安装与接线每个传送带都必须安装编码器
每个编码器需要与PG板连线
(脉冲发生板)通过触发脉冲输入可以获得编码器的当前位置脉冲,机器人即可知道传送带位置,实现跟踪
爱普生传送带跟踪培训资料编码器的连接:PG板有100个pin脚,分两个50个pin脚的终端接口(terminalblock)编码器的四根信号线A+、A-、B+、B-需要接到block1的10、11、12、13pin脚,另外编码器的5v电压也需要接到外部5V直流电压源
硬件安装与接线爱普生传送带跟踪培训资料编码器硬件触发的连接:使用硬件IO触发编码器脉冲锁存信号,需要接线到端子板的20Pin,以及给25Pin和50Pin接