控制系统仿真与 CAD 课程设计学院:物流工程学院专业:测控技术与仪器班级:测控 102 姓名:杨红霞学号:201010233037 指导教师:兰莹完成日期: 2013 年 7 月 4 日一、 目的和任务配合《控制系统仿真与CAD》课程的理论教学,通过课程设计教学环节,使学生掌握当前流行的演算式MATLAB语言的基本知识,学会运用MATLAB语言进行控制系统仿真和辅助设计的基本技能,有效地提高学生实验动手能力
一、基本要求:1、利用 MATLAB 提供的基本工具,灵活地编制和开发程序,开创新的应用;2、熟练地掌握各种模型之间的转换,系统的时域、频域分析及根轨迹绘制;3、熟练运用 SIMULINK对系统进行仿真;4、掌握 PID 控制器参数的设计
二、设计要求1、编制相应的程序,并绘制相应的曲线;2、对设计结果进行分析;3、撰写和打印设计报告(包括程序、结果分析、仿真结构框图、结果曲线)
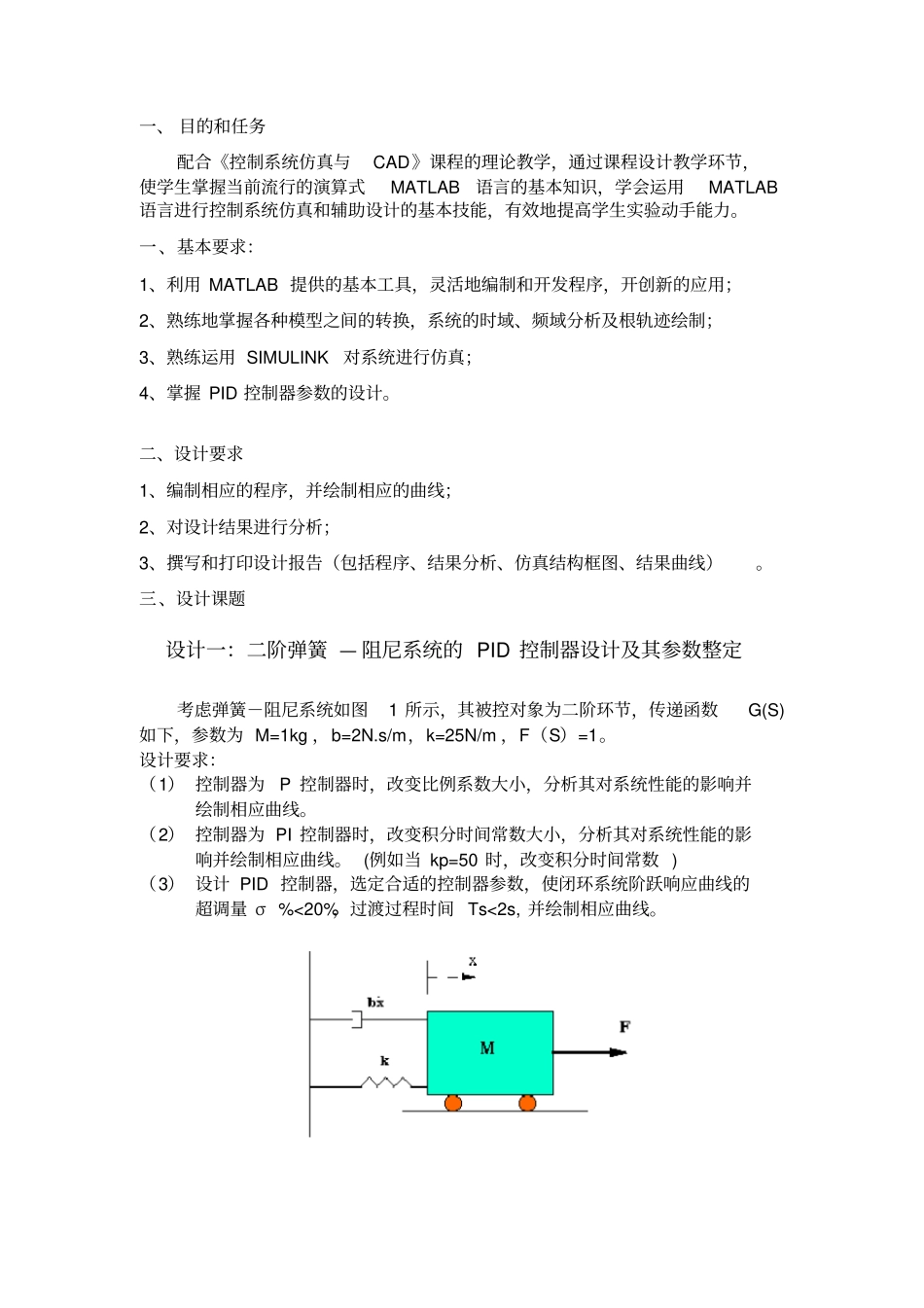
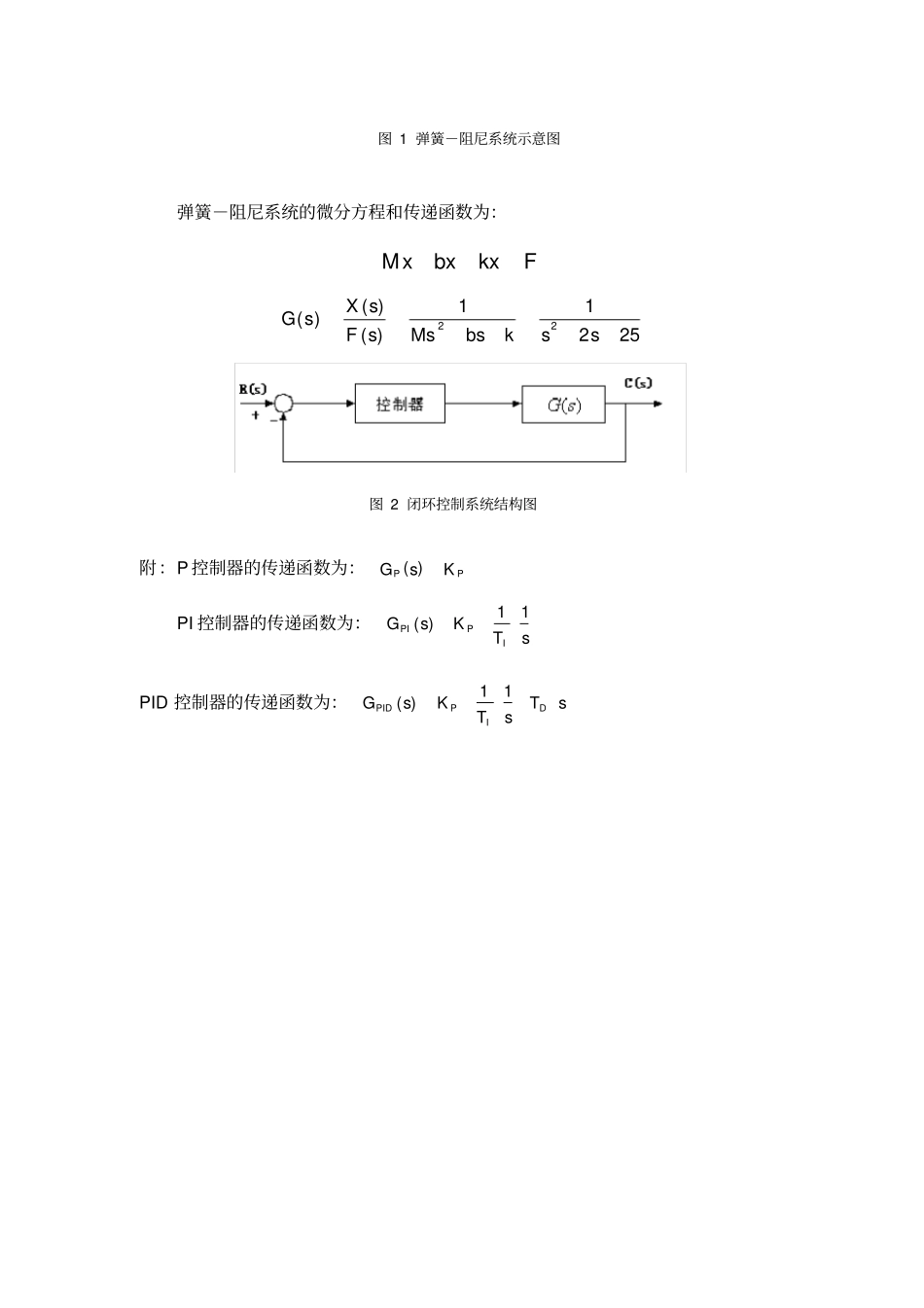
三、设计课题设计一:二阶弹簧 — 阻尼系统的 PID 控制器设计及其参数整定考虑弹簧-阻尼系统如图1 所示,其被控对象为二阶环节,传递函数G(S)如下,参数为 M=1kg ,b=2N
s/m,k=25N/m ,F(S)=1
设计要求:(1) 控制器为P 控制器时,改变比例系数大小,分析其对系统性能的影响并绘制相应曲线
(2) 控制器为 PI 控制器时,改变积分时间常数大小,分析其对系统性能的影响并绘制相应曲线
(例如当 kp=50 时,改变积分时间常数 ) (3) 设计 PID 控制器,选定合适的控制器参数,使闭环系统阶跃响应曲线的超调量 σ %