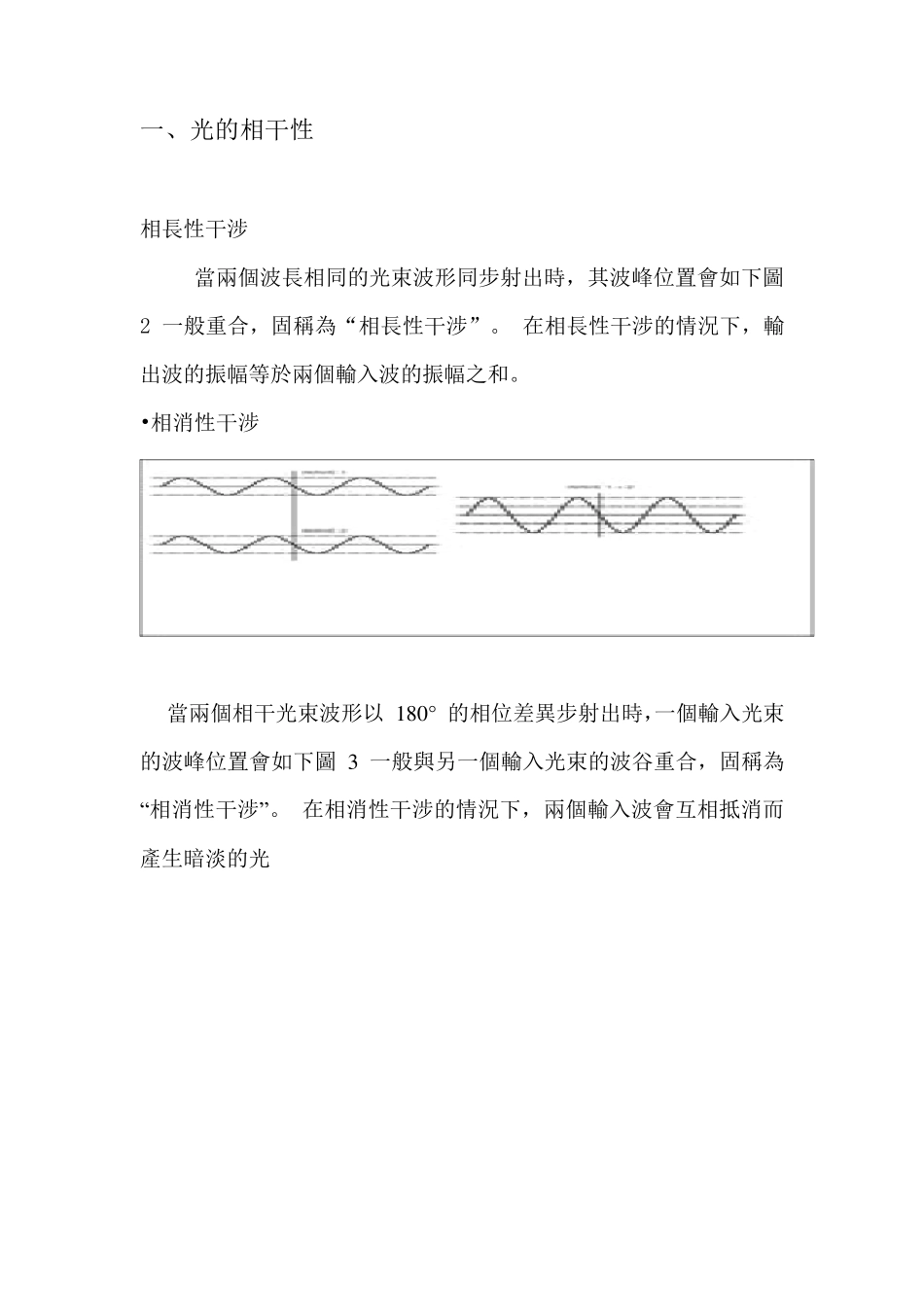
FANUC、OKUMA 机床的激光干涉仪检测方法 一、光的相干性 二、激光干涉法测距原理 三、FANUC 螺补参数的设定 四、关于 FANUC 系统正负方向补偿号的计算方法 五、FANUC 的检测用程式 六、OKUMA 螺补参数的设定 七、OKUMA 检测程式 八、检测值输入的方法 一、光的相干性 相長性干涉 當兩個波長相同的光束波形同步射出時,其波峰位置會如下圖 2 一般重合,固稱為“相長性干涉”
在相長性干涉的情況下,輸出波的振幅等於兩個輸入波的振幅之和
•相消 性干涉 當兩個相干光束波形以 180° 的相位差 異 步射出時,一個輸入光束的波峰位置會如下圖 3 一般與 另 一個輸入光束的波谷 重合,固稱為“相消 性干涉”
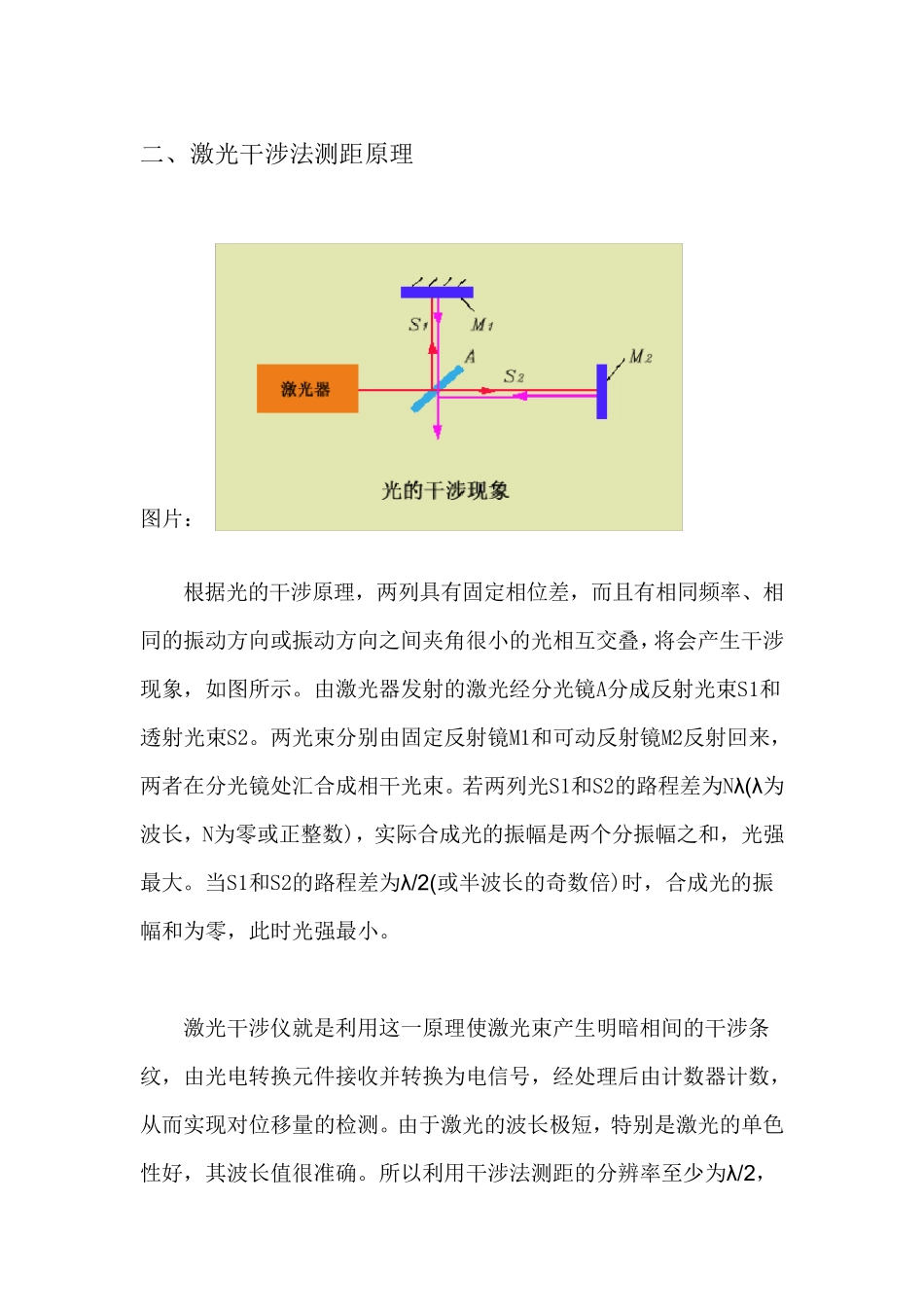
在相消 性干涉的情況下,兩個輸入波會互 相抵 消 而產 生 暗 淡 的光 二、激光干涉法测距原理 图片: 根据光的干涉原理,两列具有固定相位差,而且有相同频率、相同的振动方向或振动方向之间夹角很小的光相互交叠,将会产生干涉现象,如图所示
由激光器发射的激光经分光镜A分成反射光束S1和透射光束S2
两光束分别由固定反射镜M1和可动反射镜M2反射回来,两者在分光镜处汇合成相干光束
若两列光S1和S2的路程差为Nλ(λ为波长,N为零或正整数),实际合成光的振幅是两个分振幅之和,光强最大
当S1和S2的路程差为λ/2(或半波长的奇数倍)时,合成光的振幅和为零,此时光强最小
激光干涉仪就是利用这一原理使激光束产生明暗相间的干涉条纹,由光电转换元件接收并转换为电信号,经处理后由计数器计数,从而实现对位移量的检测
由于激光的波长极短,特别是激光的单色性好,其波长值很准确
所以利用干涉法测距的分辨率至少为λ/2,利用现代电子技术还可测定0
01个光干涉条纹
因此,用激光干涉法测距的精度极高
激光干涉仪由激光管、稳频器、光学干涉部分、光电接受元件、计数器和数字