实验、线性系统的校正方法 一,实验目的 1 .掌握系统校正的方法,重点了解串联校正
2 .根据期望的时域性能指标推导出系统的串联校正环节的传递函数
3 ,比较校正前后系统的性能改变,分析校正后的效果
4 , 了解和掌握串联超前校正、滞后校正的原理,及超前校正、滞后校正网络的参数的计算
二,实验原理 1 ,所谓校正就是指在系统中加入一些机构或装臵 (其参数可以根据需要而调整),使系统特性 发生变化,从而满足系统的各项性能指标
按校正装臵在系统中的连接方式,可分为:串联校 正、反馈校正和复合控制校正三种
串联校正是在主反馈回路之内采用的校正方式 2
超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提下,提高系统的动态性能
通过加入超前校正环节,利用其相位超前特性来增大系统的相位裕度,改变系统的开环频率特性
一般使校正环节的最大相位超前角出现在系统新的穿越频率点
滞后校正通过加入滞后校正环节,使系统的开环增益有较大幅度增加,同时又使校正后的系统动态指标保持原系统的良好状态
它利用滞后校正环节的低通滤 波 特性,在不影 响 校正后系统低频特性的情 况下,使校正后系统中高频段 增益降 低,从而使其穿越频率前移 ,达 到增加系统相位裕度的目的
三,实验内容 A、已知单位负反馈系统被控对象的传递函数如下G(S)=K/S/(S+1) 设计一个超前校正网络Gc(S),是系统满足如下要求:单位斜坡输入作用下,系统稳态误差小于 0
1;校正后系统的相位裕量大于45度
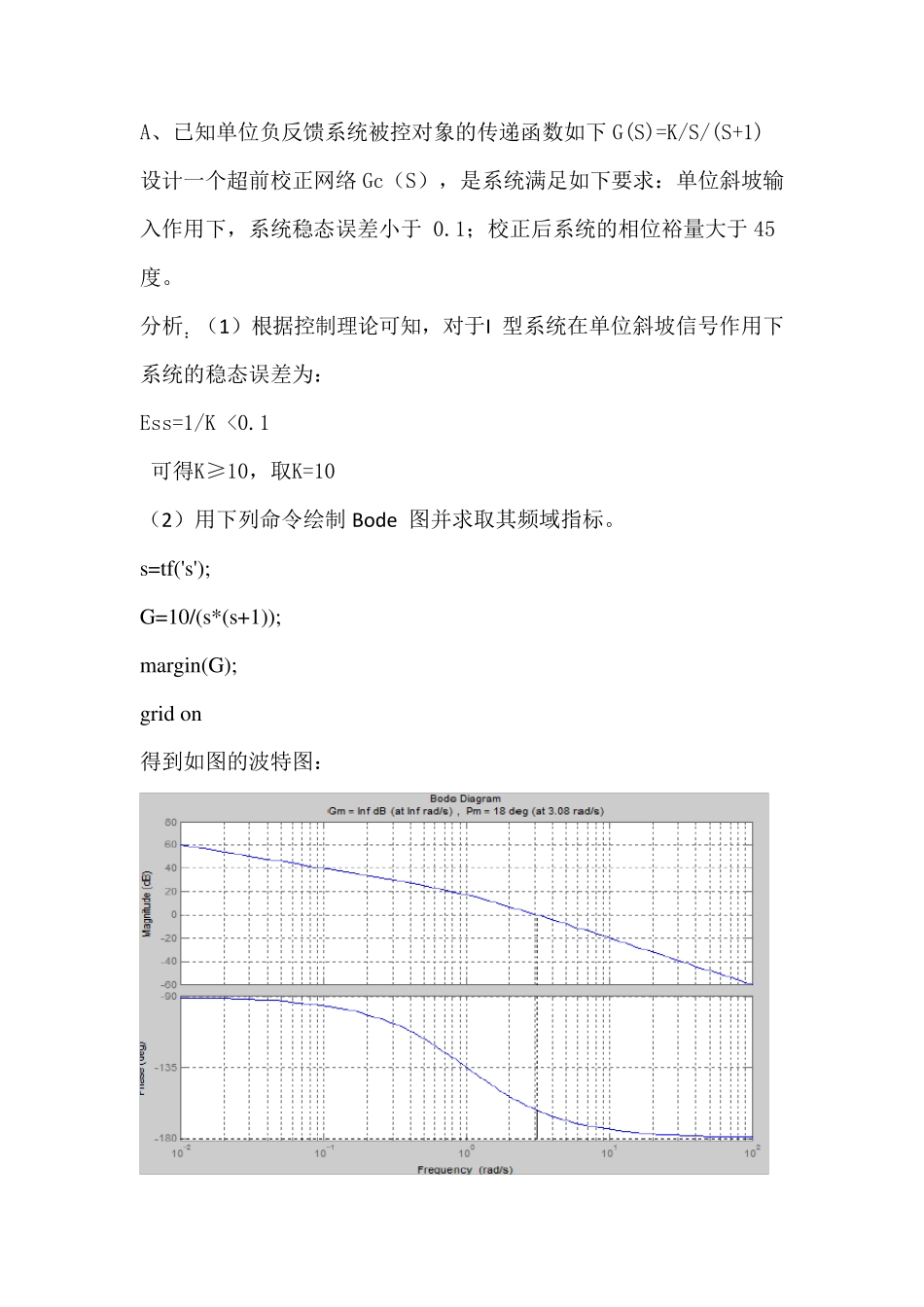
分析:(1)根据控制理论可知,对于I 型系统在单位斜坡信号作用下系统的稳态误差为: Ess=1/K