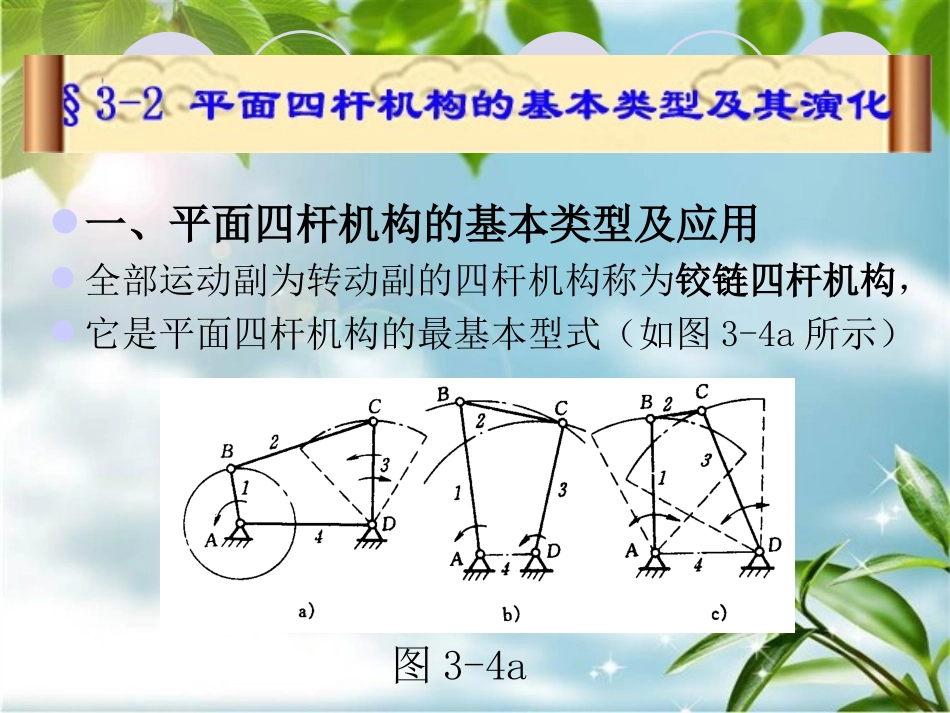
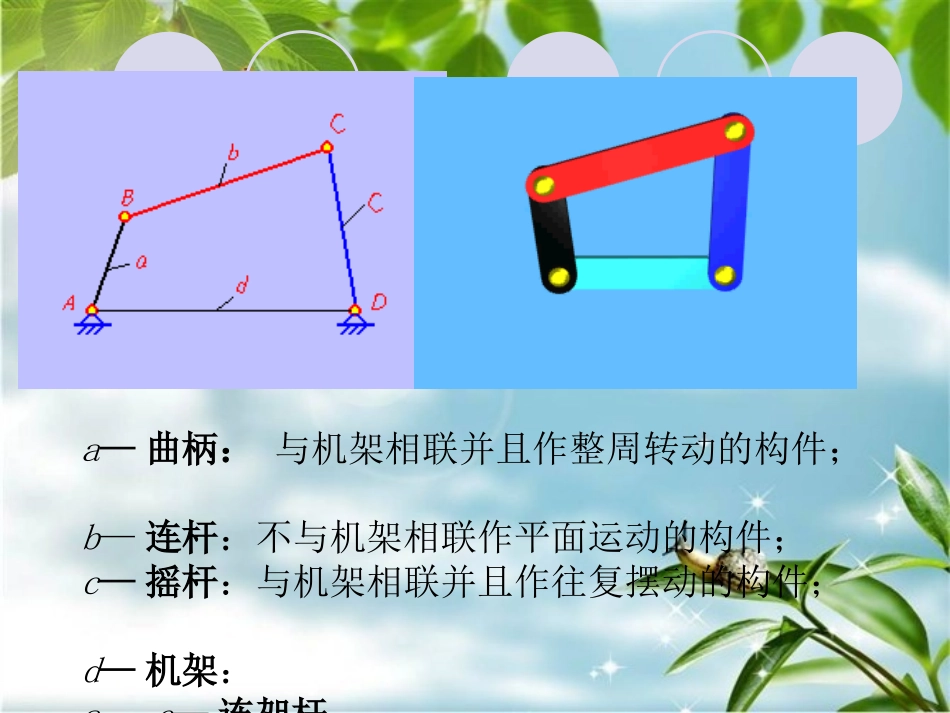
一、平面四杆机构的基本类型及应用全部运动副为转动副的四杆机构称为铰链四杆机构,它是平面四杆机构的最基本型式(如图3-4a所示)图3-4aa—曲柄:与机架相联并且作整周转动的构件;b—连杆:不与机架相联作平面运动的构件;c—摇杆:与机架相联并且作往复摆动的构件;d—机架:a、c—连架杆
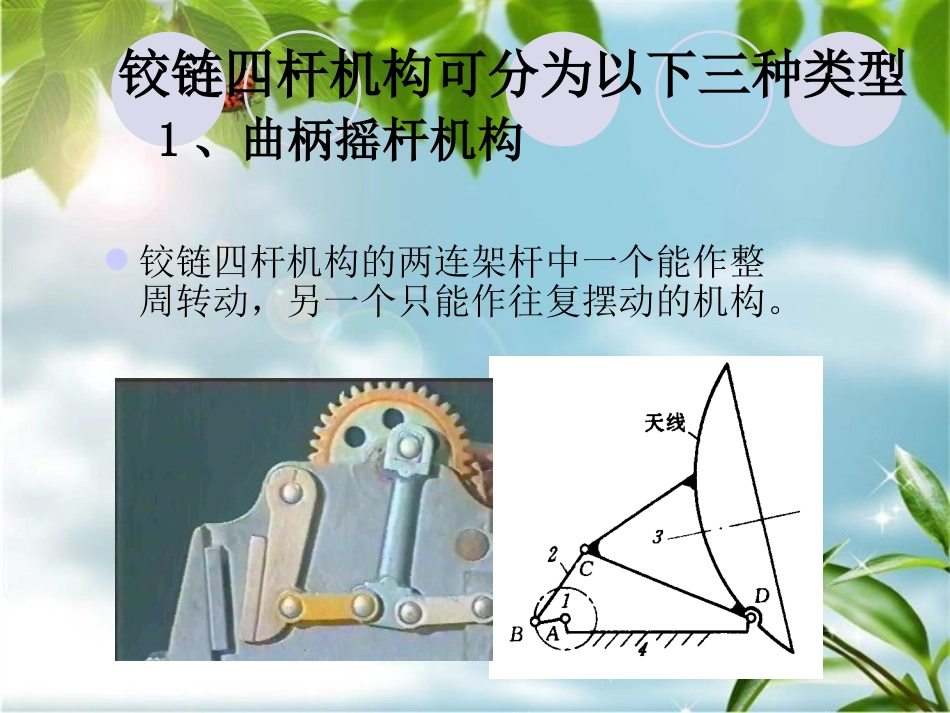
铰链四杆机构可分为以下三种类型1、曲柄摇杆机构铰链四杆机构的两连架杆中一个能作整周转动,另一个只能作往复摆动的机构
2、双曲柄机构铰链四杆机构的两连架杆均能作整周转动的机构
在双曲柄机构中,若相对两杆平行相等,称为平行双曲柄机构(图3-9)
这种机构的特点是其两曲柄能以相同的角速度同时转动,而连杆作平行移动
图3-10a所示机车车轮联动机构和图3-10b所示的摄影平台升降机构均为其应用实例
图3-9图3-10在图3-11a所示双曲柄机构中,虽然其对应边长度也相等,但BC杆与AD杆并不平行,两曲柄AB和CD转动方向也相反,故称其为反平行四边形机构
图3-11b所示的车门开闭机构即为其应用实例,它是利用反平行四边形机构运动时,两曲柄转向相反的特性,达到两扇车门同时敞开或关闭的目的
图3-113、双摇杆机构双摇杆机构:铰链四杆机构中的两连架杆均不能作整周转动的机构
如图3-12所示鹤式起重机的双摇杆机构ABCD,它可使悬挂重物作近似水平直线移动,避免不必要的升降而消耗能量
在双摇杆机构中,若两摇杆的长度相等称等腰梯形机构,如图3—13中的汽车前轮转向机构
前面介绍的三种铰链四杆机构,还远远满足不了实际工作机械的需要,在实际应用中,常常采用多种不同外形、构造和特性的四杆机构,这些类型的四杆机构可以看作是由铰链四杆机构通过各种方法演化而来的
这些演化机构扩大了平面连杆机构的应用,丰富了其内涵
二、平面连杆机构的演化1、改变相对杆长、转动副演化为移动副在曲柄摇杆机构中,若摇杆的杆长增