1 毕业设计 ( 论文 ) 外文资料翻译院 (系):机电工程学院专业:机械设计制造及其自动化班级:070216 姓名:司建星学号:070216311 附件:1
原文;2011 年 5 月 5 日2 一种新型 2T2R 四自由度并联机器人摘要 ------最近提出了一种新型的并联机器人, 它是由两个移动自由度和两个转动自由度组成的四自由度的机器人
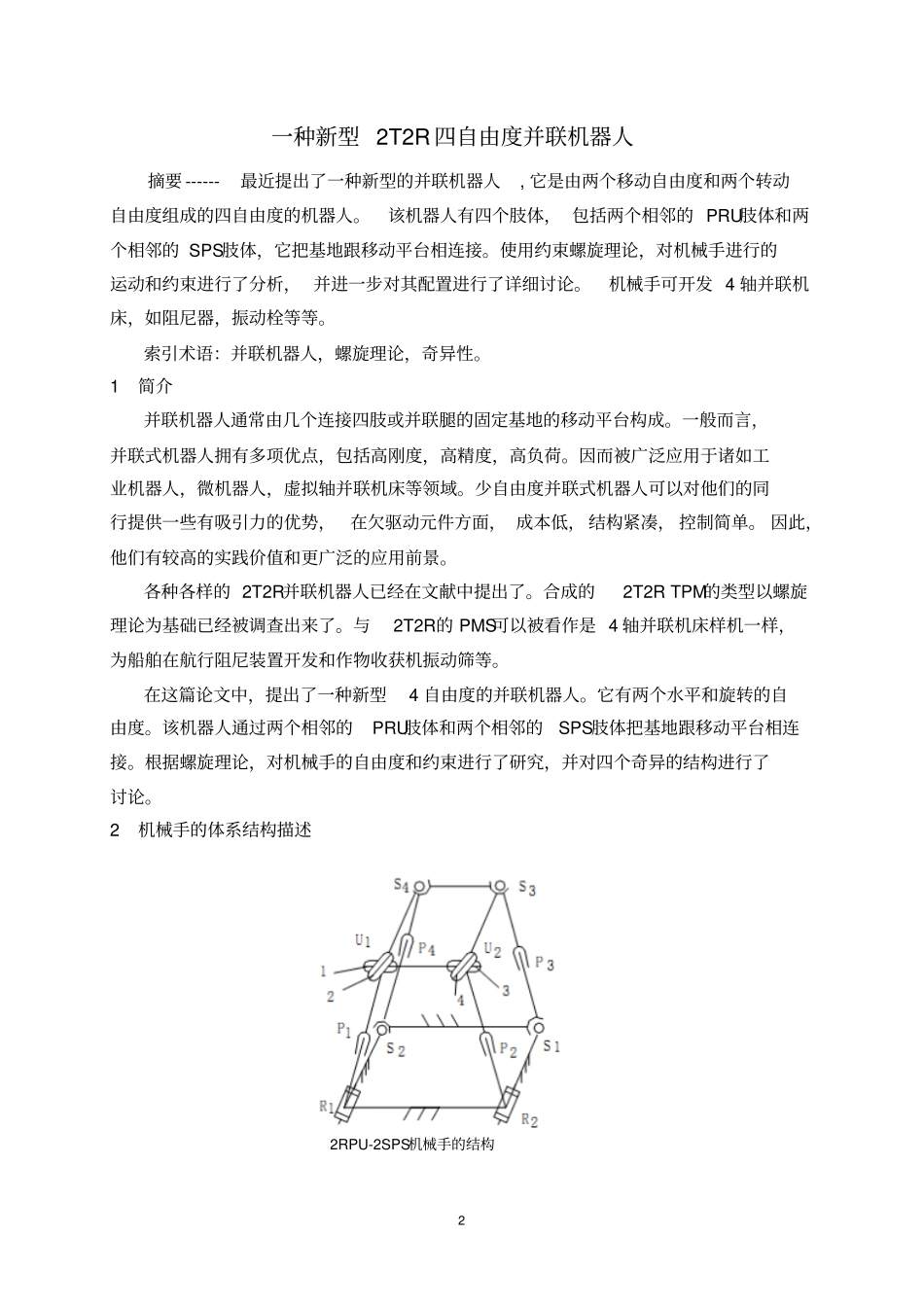
该机器人有四个肢体, 包括两个相邻的 PRU肢体和两个相邻的 SPS肢体,它把基地跟移动平台相连接
使用约束螺旋理论,对机械手进行的运动和约束进行了分析, 并进一步对其配置进行了详细讨论
机械手可开发 4 轴并联机床,如阻尼器,振动栓等等
索引术语:并联机器人,螺旋理论,奇异性
1 简介并联机器人通常由几个连接四肢或并联腿的固定基地的移动平台构成
一般而言,并联式机器人拥有多项优点,包括高刚度,高精度,高负荷
因而被广泛应用于诸如工业机器人,微机器人,虚拟轴并联机床等领域
少自由度并联式机器人可以对他们的同行提供一些有吸引力的优势,在欠驱动元件方面, 成本低, 结构紧凑, 控制简单
因此,他们有较高的实践价值和更广泛的应用前景
各种各样的 2T2R并联机器人已经在文献中提出了
合成的2T2R TPM的类型以螺旋理论为基础已经被调查出来了
与2T2R的 PMS可以被看作是 4 轴并联机床样机一样,为船舶在航行阻尼装置开发和作物收获机振动筛等
在这篇论文中,提出了一种新型4 自由度的并联机器人
它有两个水平和旋转的自由度
该机器人通过两个相邻的PRU肢体和两个相邻的SPS肢体把基地跟移动平台相连接
根据螺旋理论,对机械手的自由度和约束进行了研究,并对四个奇异的结构进行了讨论
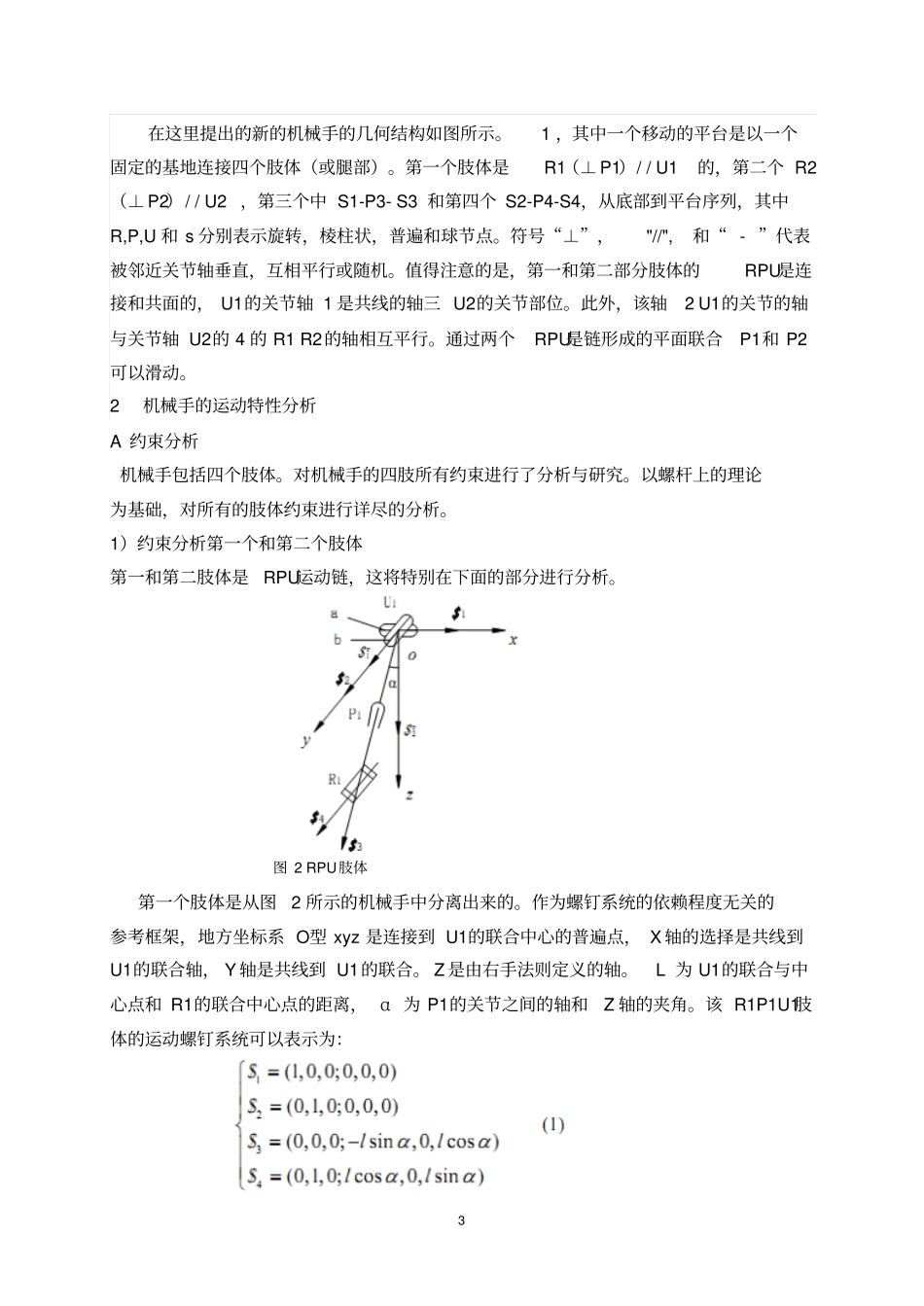
2机械手的体系结构描述2RPU-2SPS机械手的结构3 在这里提出的新的机械手的几何结构如图所示
1 ,其中一个移动的平台是以一个固定的基地连接