MATLAB 语言与控制系统仿真实训教程-参考答案-第 6 章 1 6
4 控制系统频域分析MATLAB 仿真实训 6
1 实训目的 1
学会利用MATLAB 绘制开环系统的伯德图; 2
学会利用MATLAB 绘制开环系统的极坐标图; 3
掌握通过编程或相关命令求取系统稳定裕度的方法; 4
通过仿真进一步理解掌握系统频域分析的有关知识
2 实训内容 1
已知单位负反馈系统的开环传递函数为 10
2 s1s1
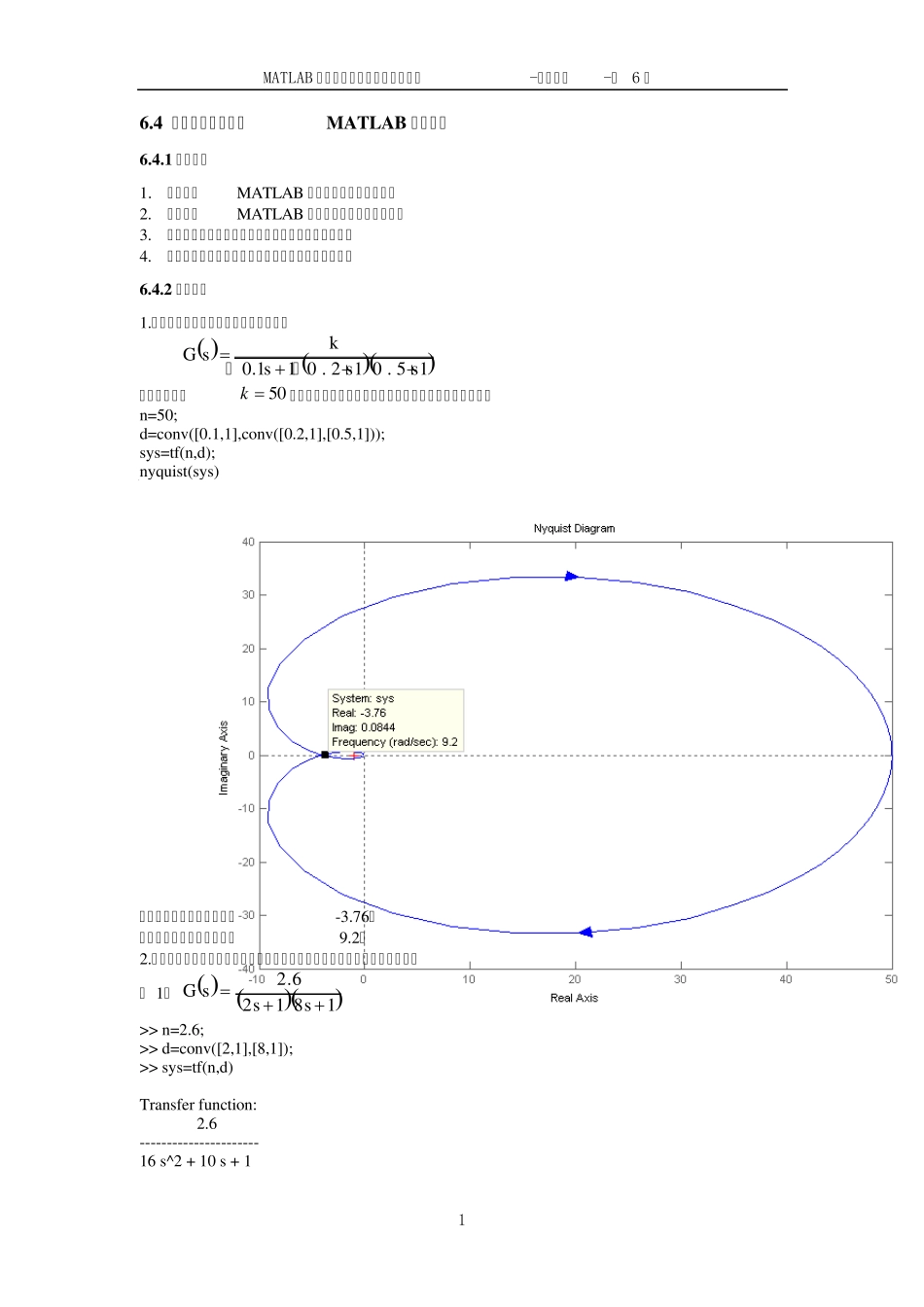
0ksG)( 要求编程绘制50k时的极坐标图,确定曲线与负实轴的交点坐标及频率值; n=50; d=conv ([0
1,1],conv ([0
2,1],[0
5,1])); sy s=tf(n,d); ny qu ist(sy s) 曲线与负实轴的交点坐标为-3
76; 曲线与负实轴的交点频率值9
绘制下列系统的伯德图,并要求在图上显示出幅值裕度、相角裕度等信息
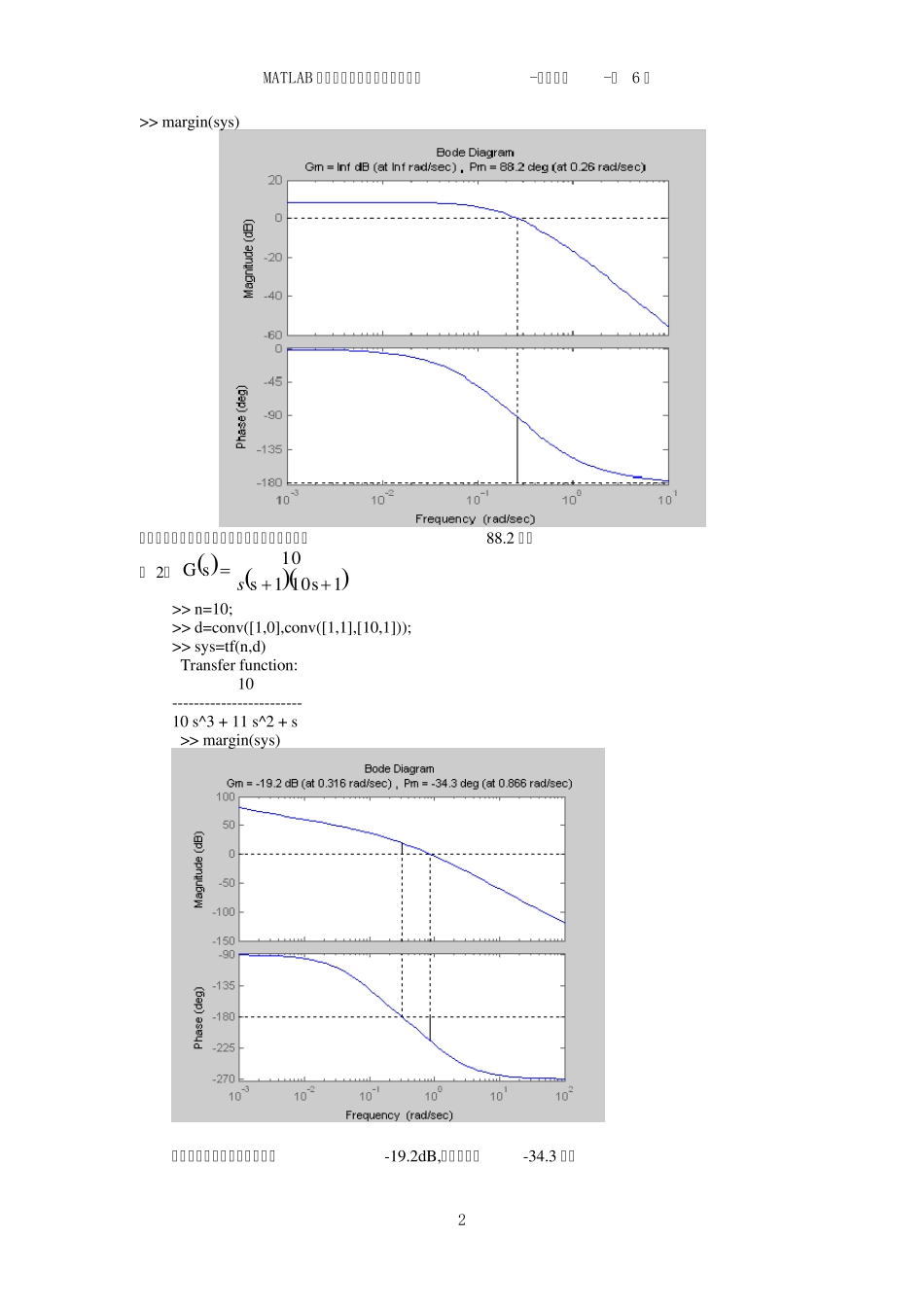
( 1) 18s12s2
6sG >> n=2
6; >> d=conv ([2,1],[8,1]); >> sy s=tf(n,d) Transfer fu nction: 2
6 ---------------------- 16 s^2 + 10 s + 1 MATLAB 语言与控制系统仿真实训教程-参考答案-第 6 章 2 >> margin(sy s) 从图上信息可知,幅值裕度为无穷,相角裕度为88
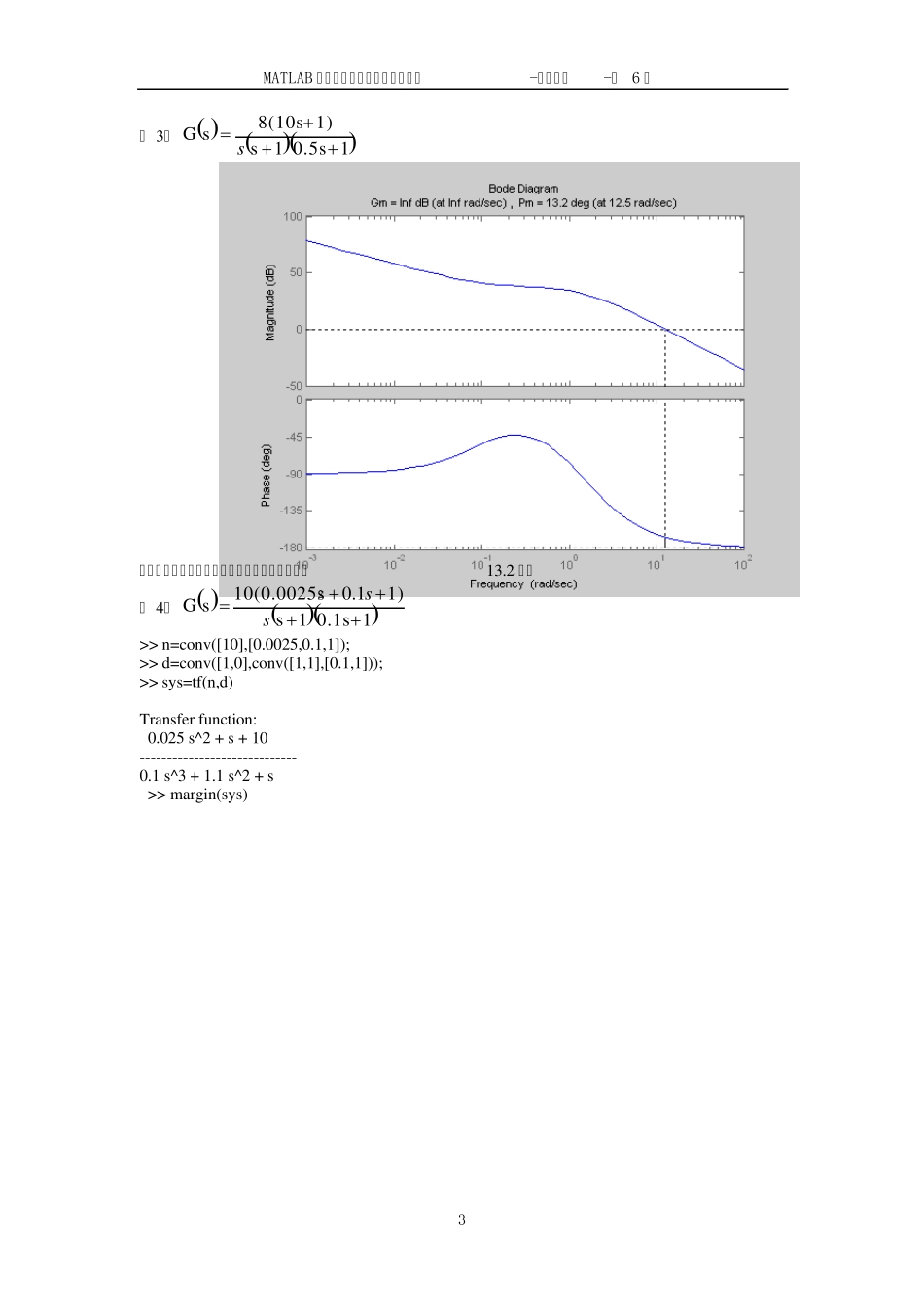
( 2) 110s1s10sG s >> n=10; >> d=conv ([1,0],conv ([1,1],[10,1])); >> sy s=tf(n,d) Transfer fu nction: 10 ------------------------ 10 s^3 +