模态空间 — 时域,频域与模态空间之间的联系这是一个常见的问题
但这个问题会涉及到很多不同的方面,因此我们先从一个简单的示意图入手,并且尽量避免涉及到过多的数学知识
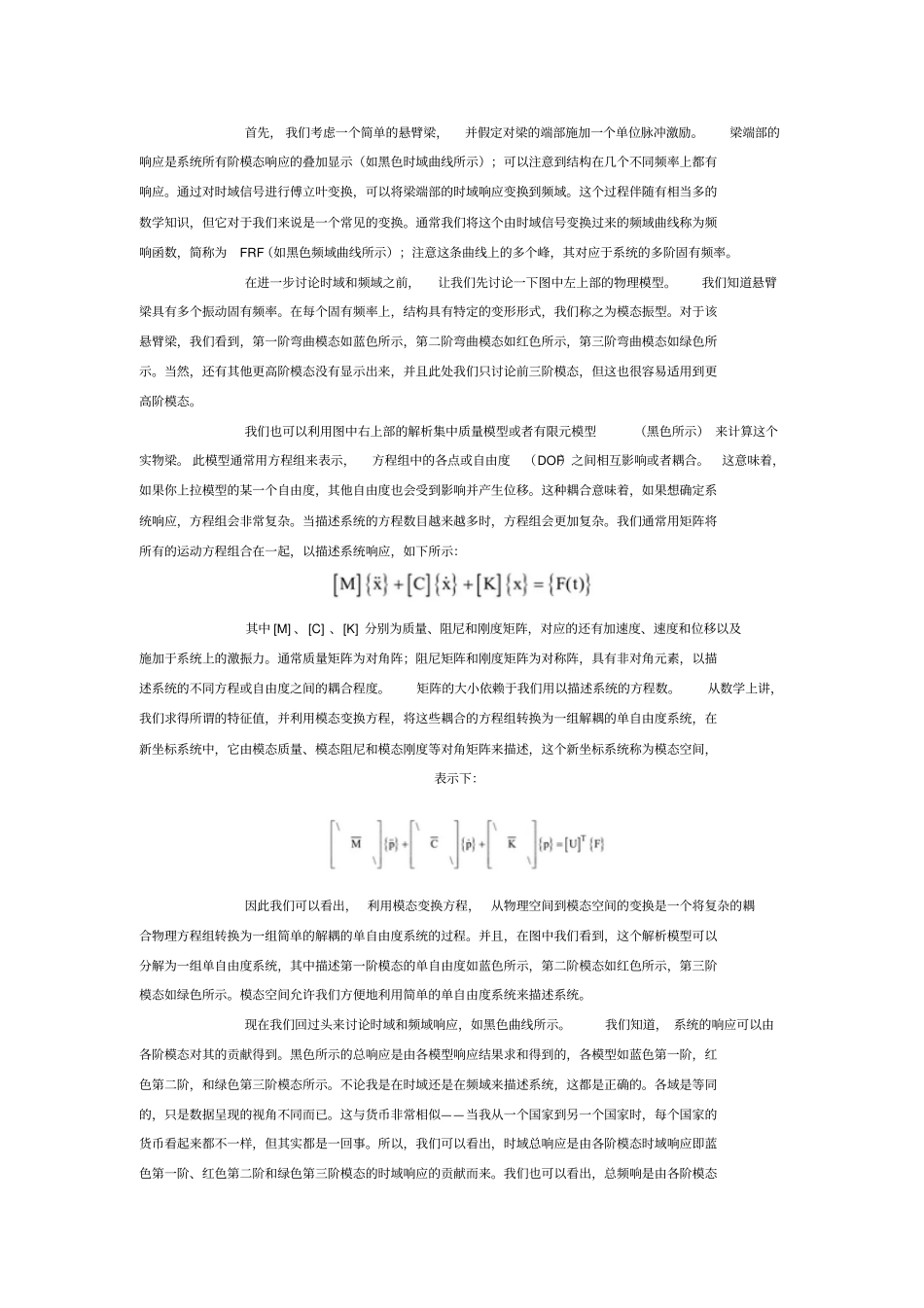
我们通过这幅图来讨论时域、频域、模态空间和物理空间所有这些不同的方面
示意图中要讨论的内容有很多,所以我们先将他们分开逐一讨论,最后再将其整合到一起
你应该还记得我们先前的讨论,你问我模态分析是怎么一回事(“模态分析的简要解释”),这对下面的讨论很有帮助
首先, 我们考虑一个简单的悬臂梁,并假定对梁的端部施加一个单位脉冲激励
梁端部的响应是系统所有阶模态响应的叠加显示(如黑色时域曲线所示);可以注意到结构在几个不同频率上都有响应
通过对时域信号进行傅立叶变换,可以将梁端部的时域响应变换到频域
这个过程伴随有相当多的数学知识,但它对于我们来说是一个常见的变换
通常我们将这个由时域信号变换过来的频域曲线称为频响函数,简称为FRF(如黑色频域曲线所示);注意这条曲线上的多个峰,其对应于系统的多阶固有频率
在进一步讨论时域和频域之前,让我们先讨论一下图中左上部的物理模型
我们知道悬臂梁具有多个振动固有频率
在每个固有频率上,结构具有特定的变形形式,我们称之为模态振型
对于该悬臂梁,我们看到,第一阶弯曲模态如蓝色所示,第二阶弯曲模态如红色所示,第三阶弯曲模态如绿色所示
当然,还有其他更高阶模态没有显示出来,并且此处我们只讨论前三阶模态,但这也很容易适用到更高阶模态
我们也可以利用图中右上部的解析集中质量模型或者有限元模型(黑色所示) 来计算这个实物梁
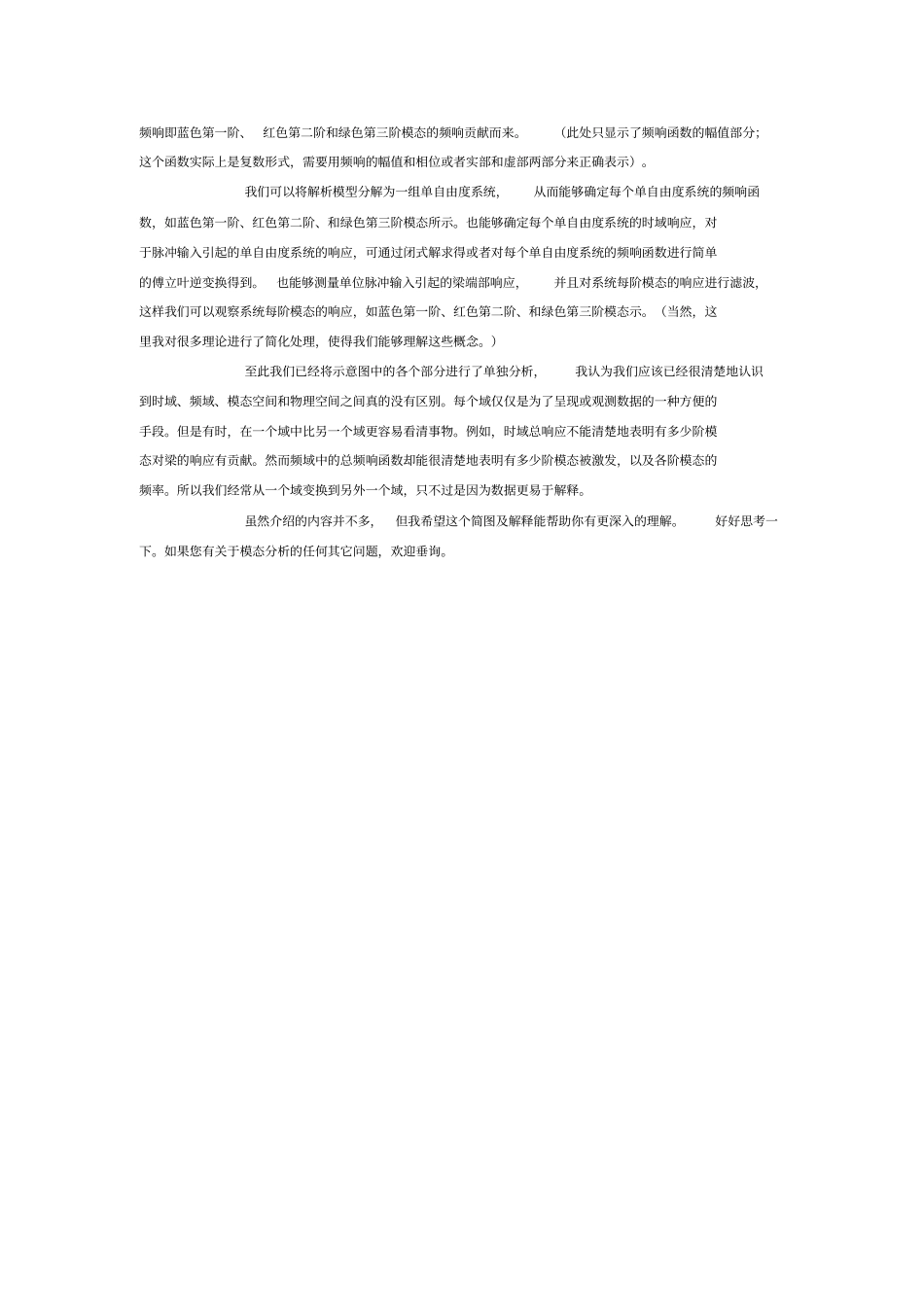
此模型通常用方程组来表示,方程组中的各点或自由度(DOF)之间相互影响或者耦合
这意味着,如果你上拉模型的某一个自由度,其他自由度也会受到影响并产生位移
这种耦合意味着,如果想确定系统响应,方程组会非常复杂
当描述系统的方程数目越来越多时,方程组会更加复杂
我们通常用矩阵