在 机 器 人 机 电 控 制 系 统 中 , 舵 机 控 制 效 果 是 性 能 的 重 要 影 响 因 素
舵 机 可 以 在 微机 电 系 统 和 航 模 中 作 为 基 本 的 输 出 执 行 机 构 ,其 简 单 的 控 制 和 输 出 使 得 单 片 机 系统 非 常 容 易 与 之 接 口
舵 机 是 一 种 位 置 伺 服 的 驱 动 器 , 适 用 于 那 些 需 要 角 度 不 断 变 化 并 可 以 保 持的 控 制 系 统
其 工 作 原 理 是 : 控 制 信 号 由 接 收 机 的 通 道 进 入 信 号 调 制 芯 片 , 获 得直 流 偏 置 电 压
它 内 部 有 一 个 基 准 电 路 , 产 生 周 期 为 20ms, 宽 度 为 1
5ms 的 基准 信 号 , 将 获 得 的 直 流 偏 置 电 压 与 电 位 器 的 电 压 比 较 , 获 得 电 压 差 输 出
最 后 ,电 压 差 的 正 负 输 出 到 电 机 驱 动 芯 片 决 定 电 机 的 正 反 转
当 电 机 转 速 一 定 时 , 通 过级 联 减 速 齿轮带动 电 位 器 旋转 , 使 得 电 压 差 为 0, 电 机 停止转 动
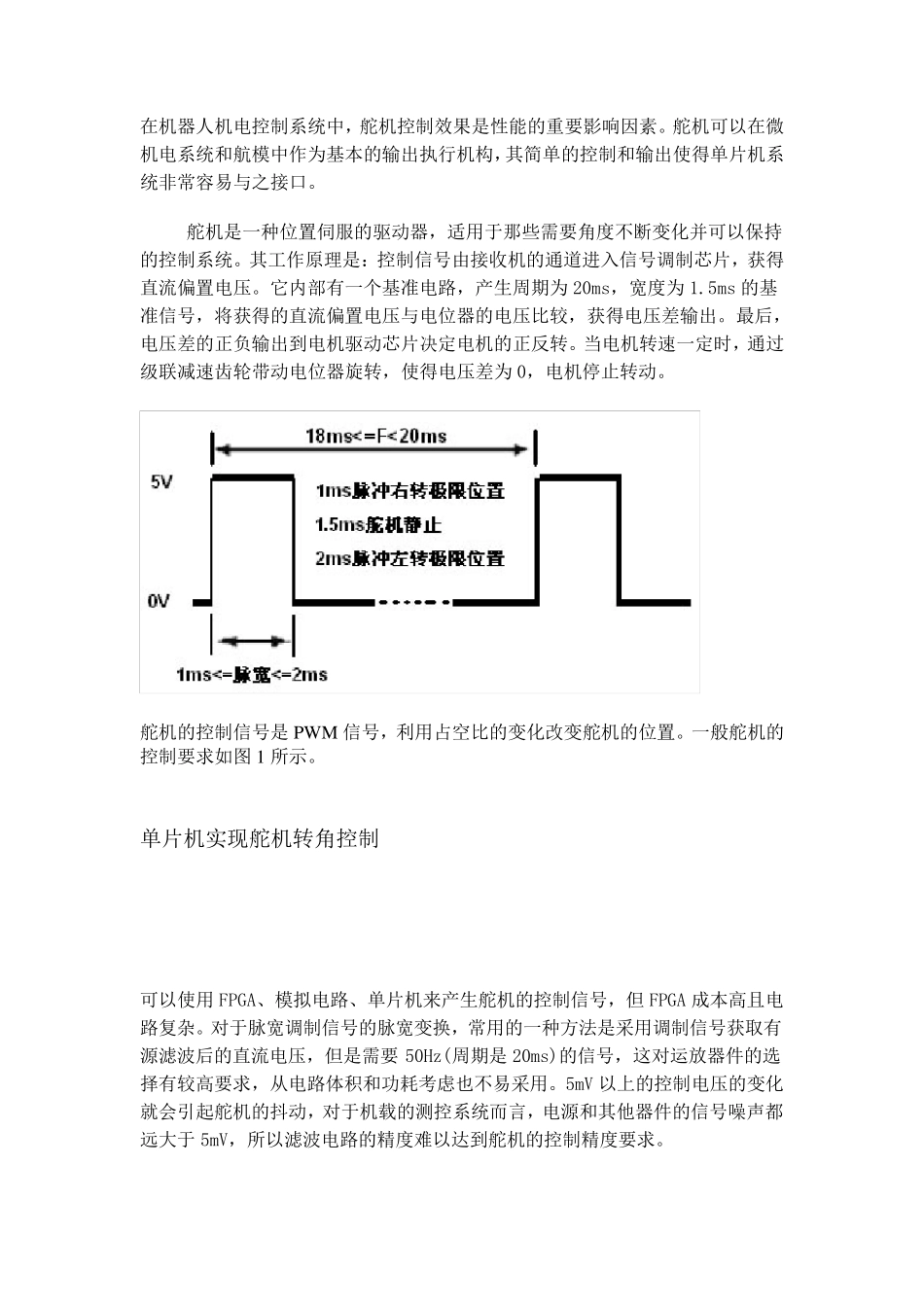
舵 机 的 控 制 信 号 是 PW M 信 号 , 利用 占空比 的 变 化 改变 舵 机 的 位 置
一 般舵 机 的控 制 要 求如图1 所示
单 片 机 实现舵 机 转 角 控 制 可 以 使 用 FPGA、模 拟电 路 、单 片 机 来产 生 舵 机 的 控 制 信 号 , 但FPGA 成本 高且电路 复杂
对于 脉宽 调 制 信 号 的 脉宽 变 换, 常 用 的 一 种 方法是 采 用 调 制 信 号 获 取 有源 滤 波 后 的 直 流 电 压 , 但是 需 要50Hz(周 期 是