下载后可任意编辑四足爬牆機器人設計與實現發佈日期
05類 別技術資料出處國立高雄第一科技大學 杜國洋、 楊翔斌、 黃韋翔摘要行走機器人克服地球的地心引力是一種極大挑戰
其應用可使機器人代替人類到達危險區域工作, 例如摩天大樓玻璃窗的清洗工作
本讨论專題設計實現一四足攀爬機器人, 使能於光滑的垂直平面行走
設計過程從用以抵抗重力加速度的吸附力量測、 伺服馬達控制量測、 建立四足攀爬機器人機構與整個控制電路
為了方便機器人到達危險而人類不易到達之處, 機器人亦安裝遠端無線遙控模組
一、 原理爬牆吸附原理使機器人產生吸附力攀附在牆面上的方法有很多種方式, 如負壓式真空幫浦、 抽真空活塞、 吸塵器原理、 黏毛等等, 因考量到製作成本及機器人作動限制( 重量、 機動性) 以及機構設計實現的方便性, 最後採用以抽真空活塞機構
我們利用注射筒、 塑膠吸盤、 軟管與伺服機加上連桿製作出簡單的抽真空活塞機構
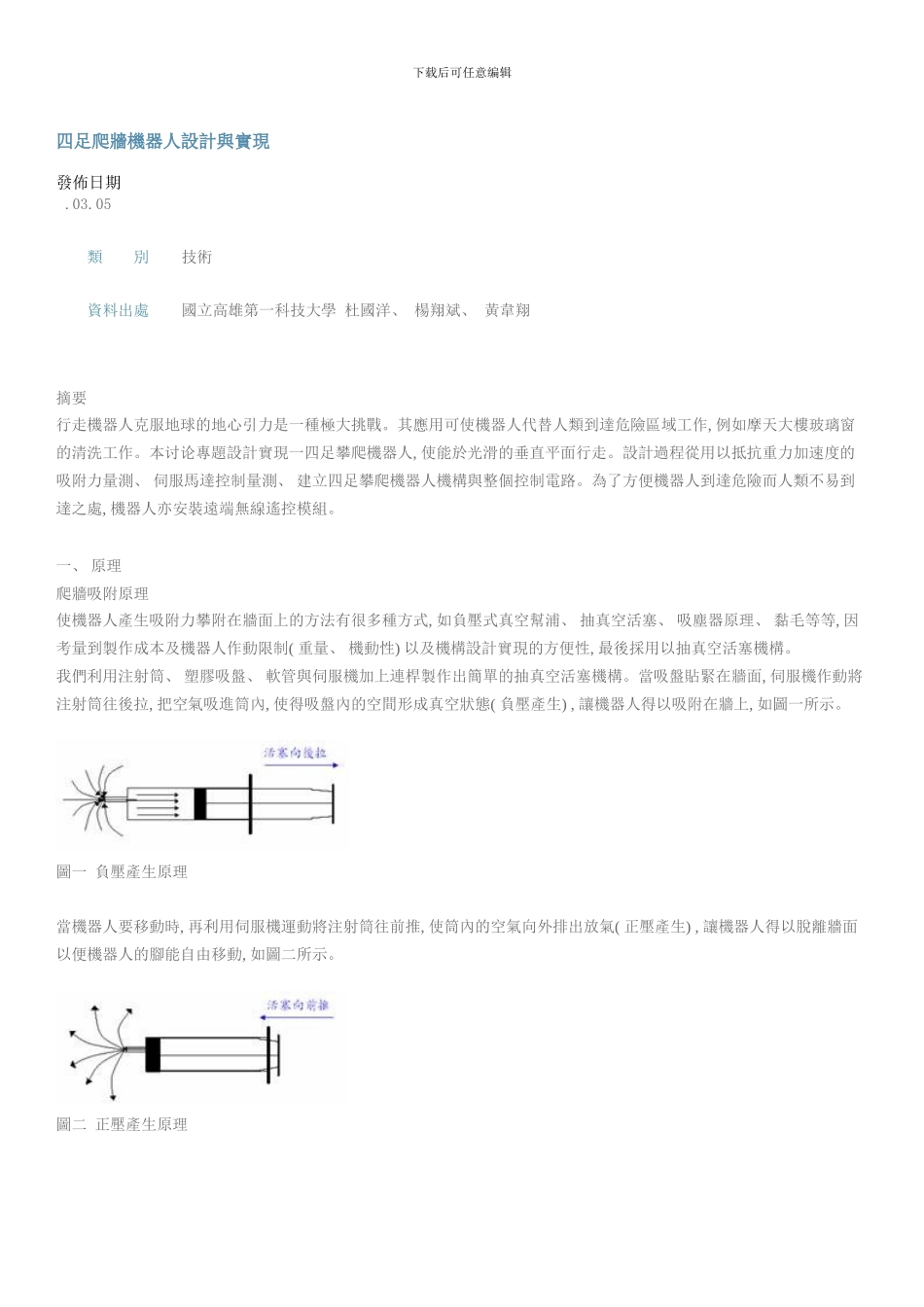
當吸盤貼緊在牆面, 伺服機作動將注射筒往後拉, 把空氣吸進筒內, 使得吸盤內的空間形成真空狀態( 負壓產生) , 讓機器人得以吸附在牆上, 如圖一所示
圖一 負壓產生原理當機器人要移動時, 再利用伺服機運動將注射筒往前推, 使筒內的空氣向外排出放氣( 正壓產生) , 讓機器人得以脫離牆面以便機器人的腳能自由移動, 如圖二所示
圖二 正壓產生原理下载后可任意编辑吸附力量測實驗為了量測活塞機構的吸附力, 將寶特瓶裝水當砝碼, 掛在機器人單足吸盤上, 如圖三與四所示, 測試單足活塞作動時吸附力所能負載之重量, 且停留 10 秒以上不掉落, 則判定單足可負載重量
裝水寶特瓶每支 600g;每次增重 600g, 每種重量皆測試五次, 增加數據可靠度
測試結果如表一
表一 單足吸附所能負重測試結果由測試結果推斷, 單足吸附力所能負載重量以 5400g 為上限
機器人爬行時, 每次皆由兩隻腳雙