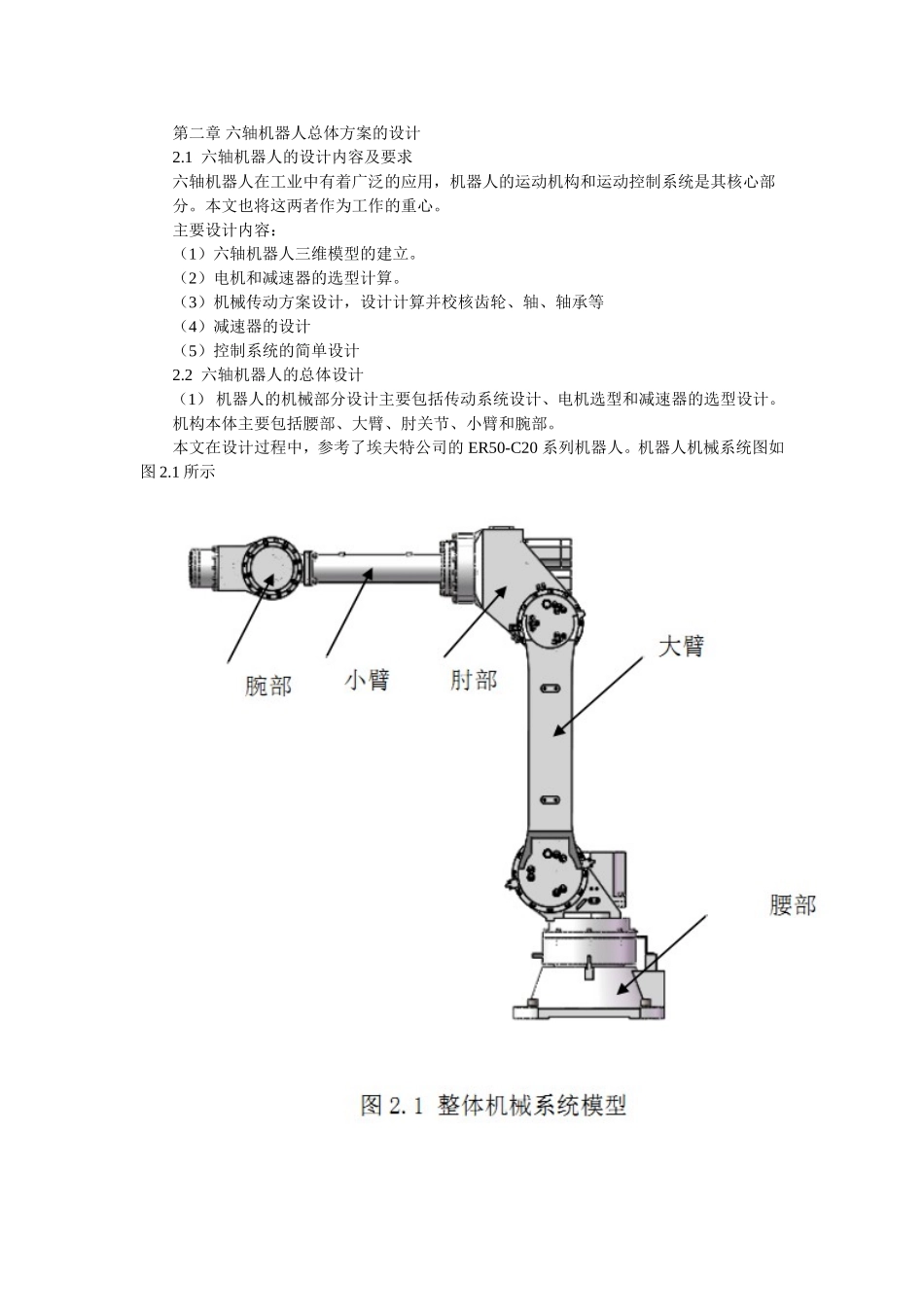
六轴机器人系统设计第一章六轴机器人总体方案的设计.................................................................................61.1六轴机器人的设计内容及要求..............................................................................61.2六轴机器人的总体设计..........................................................................................61.3机器人腰部关节的设计..........................................................................................81.4机器人肘部的设计..................................................................................................81.5机器人大小臂设计..................................................................................................91.6机器人腕部的设计................................................................................................101.7工业机器人驱动方式选择....................................................................................111.4谐波减速器介绍....................................................................................................131.4.1谐波齿轮减速器简介.........................................................................................131.4.2谐波减速器基本结构.........................................................................................131.4.3谐波减速器工作原理.........................................................................................141.4.4谐波减速器的主要特性......................................................................................151.4.5谐波减速器的减速比..........................................................................................161.5RV减速器介绍.....................................................................................................161.5.1RV减速器简介...................................................................................................161.4.2RV减速器基本结构...........................................................................................171.4.3RV减速器传动原理..........................................................................................171.4.3RV减速器的主要性能特征..............................................................................181.4.4RV减速器的旋转方向和减速比......................................................................19第二章机器人传动系统设计.............................................................................................222.1机器人简单模型与静力学分析............................................................................222.2伺服电机和减速器选型计算................................................................................242.3直齿轮的选择与校核............................................................................................292.4锥齿轮的选择与校核............................................................................................342.5传动系统中其余齿轮设计校核............................................................................382.5轴六的设计............................................................................................................392.6轴承的校核............................................................................................................43第三章谐波减速器的设计.................................................................................................4...