工业机器人虚拟仿真教程Smart组件的应用一、设定输送链的产品源(Source)解压练习工作站后如图用Smart组件创建动态输送链一、设定输送链的产品源(Source)1
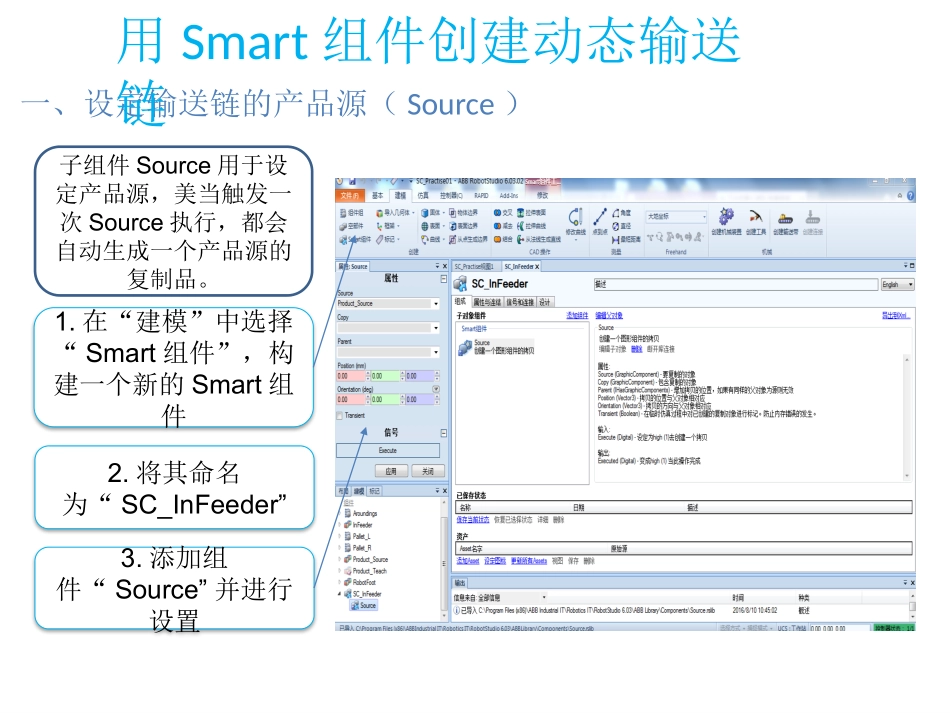
在“建模”中选择“Smart组件”,构建一个新的Smart组件2
将其命名为“SC_InFeeder”3
添加组件“Source”并进行设置子组件Source用于设定产品源,美当触发一次Source执行,都会自动生成一个产品源的复制品
用Smart组件创建动态输送链二、设定输送链的运动属性1
依次添加组件“Queue”“LinearMover”并对“LinearMover”进行设定,如图子组件LinearMover设定运动属性,其属性包含指定运动物体、运动方向、运动速度、参考坐标等
此处将之前设定的Queue设定为运动物体
用Smart组件创建动态输送链三、设定输送链限位传感器1
添加组件:选择传感器“PlaneSensor”并进行设定,设定后如图用Smart组件创建动态输送链三、设定输送链限位传感器虚拟传感器一次只能检测一个物体,所以这里需要保证所创建的传感器不能与周边设备接触,否则无法检测运动到输送链末端的产品
右击”Infeeder”,选中“可由传感器检测”,将前面的勾去掉用Smart组件创建动态输送链三、设定输送链限位传感器1
将“InFeeder”拖放到Smart组件“SC_InFeeder”中去用Smart组件创建动态输送链三、设定输送链限位传感器1
添加组件,选择“LogicGate”并进行设定后应用,如图所示用Smart组件创建动态输送链四、创建属性与连结1
属性连结是指各Smart子组件的某项属性之间的连结1
进入“属性与连结”选项卡2
单击“添加连结”用Smart组件创建动态输送链四、创建属性与连结1
设定后如图Source的Copy指的是源的复制品,Queue的Back指的是下一