线性系统理论上机实验报告题目:两轮平衡小车的建模与控制研究完成时间: 2016-11-29 1
研究背景及意义现代社会人们活动范围已经大大延伸,交通对于每个人都十分重要
交通工具的选择则是重中之重,是全社会关注的焦点
随着社会经济的发展,人民生活水平的提高,越来越多的小汽车走进了寻常百姓家
汽车快捷方便、省时省力,现代化程度高,种类繁多的个性化设计满足了不同人的需求
但它体积大、重量大、污染大、噪声大、耗油大、技术复杂、使用不便、价格贵、停放困难,效率不高,而且还会造成交通拥堵并带来安全隐患
相比之下,自行车是一种既经济又实用的交通工具
中国是自行车大国,短距离出行人们常选择骑自行车
自行车确实方便,但在使用之前需要先学会骑车,虽然看似简单,平衡能力差的人学起来却很困难,容易摔倒,造成人身伤害
另外,自行车毕竟不适宜长距离的行驶,遥远的路程会使人感到疲劳
那么,究竟有没有这样一种交通工具,集两者的优点于一身呢
既能像汽车一样方便快捷又如自行车般经济简洁,而且操作易于掌握, 易学又易用
两轮自平衡车概念就是在这样的背景下提出来的
借鉴目前国内外两轮自平衡车的成功经验,本文提出的研究目标是设计一款新型的、结构简单、成本低的两轮自平衡车,使其能够很好地实现自平衡功能,同时设计结果通过MATLAB进行仿真验证
研究内容自平衡式两轮电动车是一个非线性、强耦合、欠驱动的自不稳定系统,对其控制策略的研究具有重大的理论意义
我们通过分析两轮平衡车的物理结构以及在平衡瞬间的力学关系, 得到两轮车的力学平衡方程, 并建立其数学模型
运用MATLAB和 SIMULINK仿真系统的角度、角加速度、位移 x 和速度的 x 变化过程,对其利用外部控制器来控制其平衡
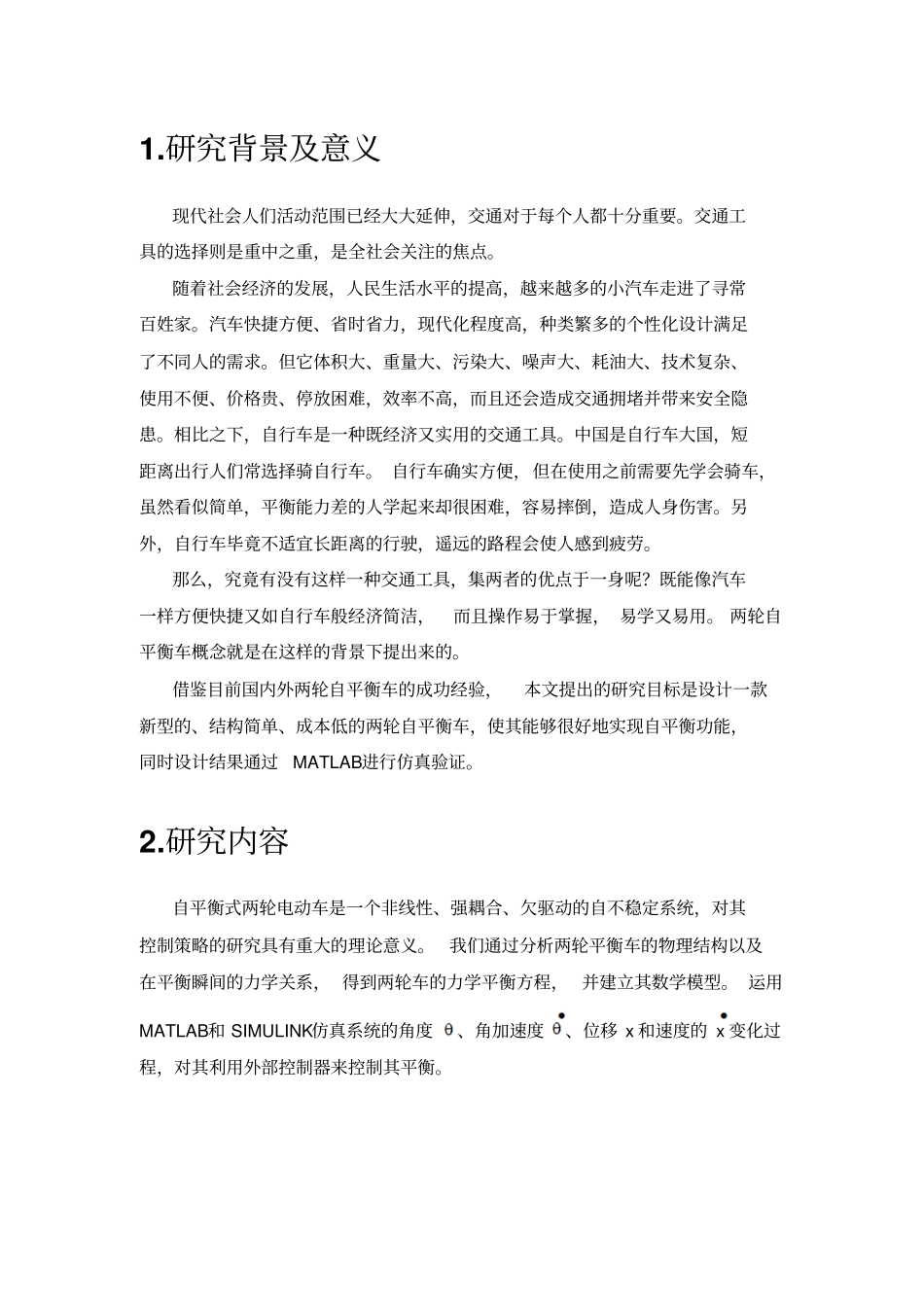
系统建模两轮平衡车的瞬时力平衡分析如图1 所示
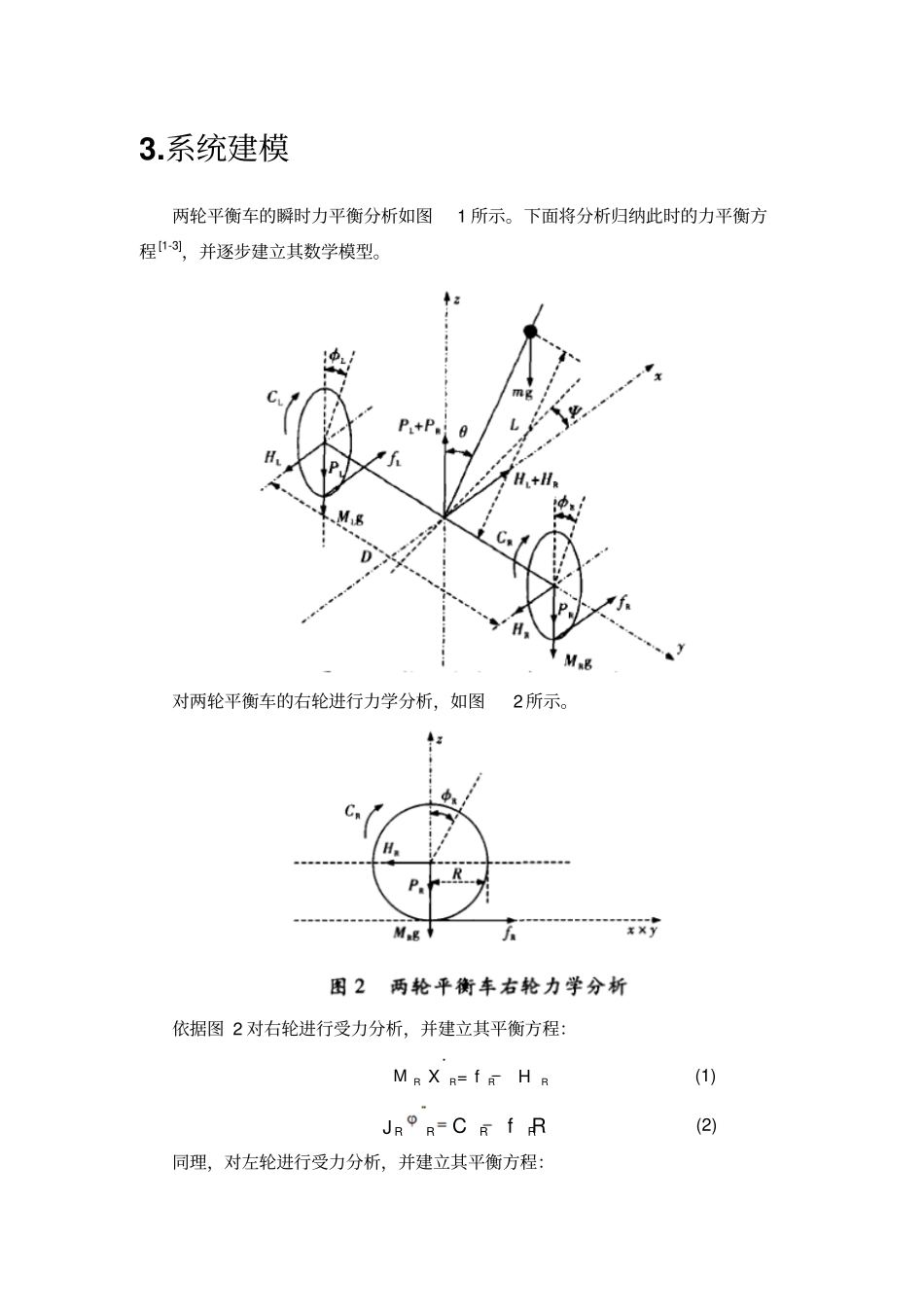
下面将分析归纳此时的力平衡方程 [1-3],并逐步建立其数学模型