自动控制原理自控控制是指在没有人的直接干预下,利用物理装置对生产设备或工艺过程进行合理的控制,使被控制的物理量保持恒定,或者按照一定的规律变化
反馈的输出量与输入量相减,称为负反馈;反之,则称为正反馈
自动控制原理系统基本组成示意图测量元件:测量被控对象的需要控制的物理量,如果这个物理量是非电量,一般需要转化为电量
给定元件:给出与期望的被控量相对应的系统输入量
比较元件:把测量元件检测的被控量实际值与给定元件给出的输入量进行比较,求出它们之间的偏差
放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被控对象
执行元件:直接作用于被控对象,使其被控量发生变化,达到预期的控制目的
校正元件:也称补偿元件,它是结构或参数便于调整的元件
对自动控制系统性能的基本要求:稳定性、快速性、准确性系统的传递函数: 线性系统, 在零初始条件下, 输出信号的拉普拉斯变换与输入信号的拉普拉斯变化之比
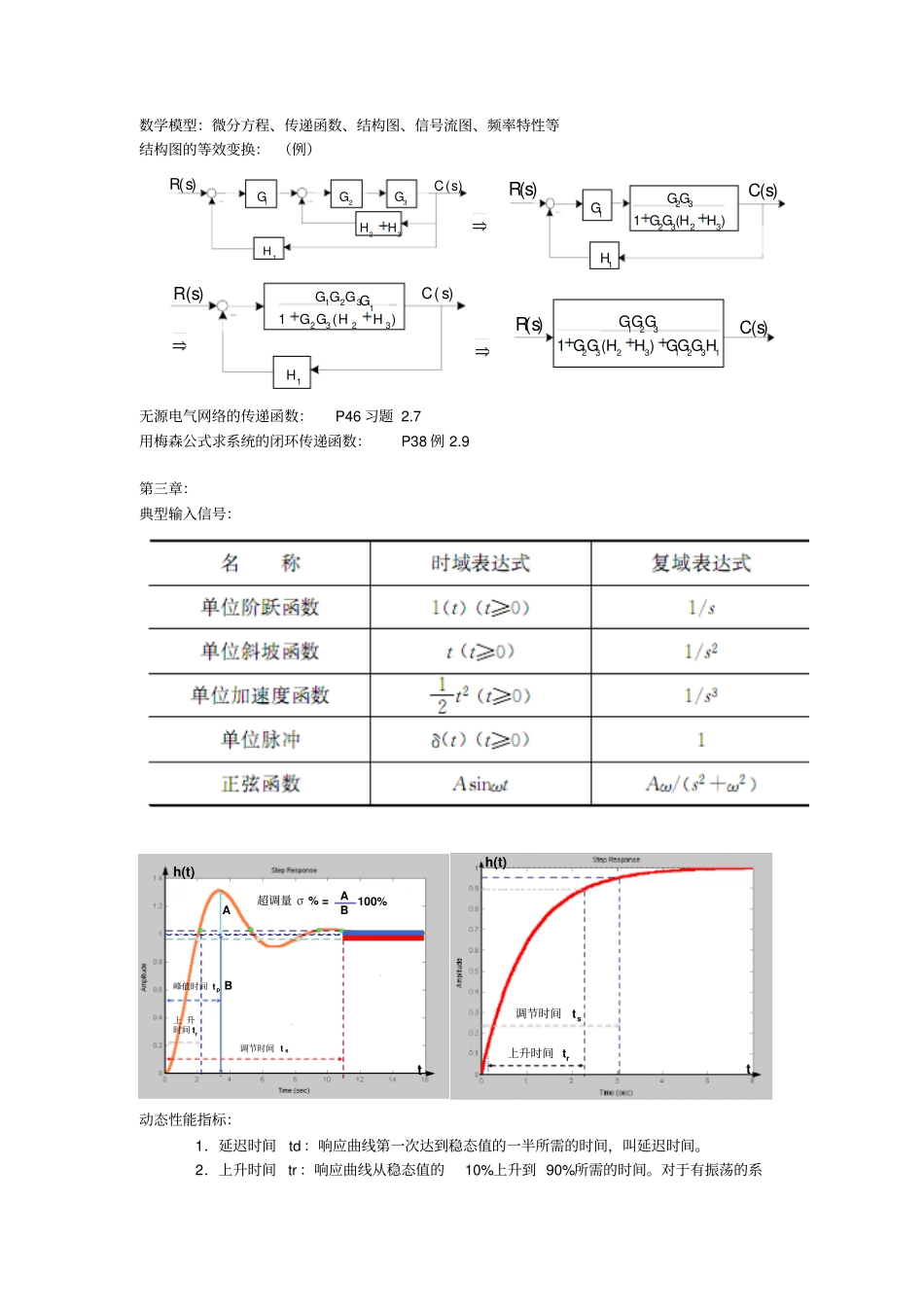
典型环节:比率环节:( )G sK惯性环节:( )1KG sTs积分环节:1( )G sTs微分环节:( )G sTs一阶微分环节:( )1G ss振荡环节:22222( )212nnnKKG sT sTsss延迟环节:( )sG se数学模型:微分方程、传递函数、结构图、信号流图、频率特性等结构图的等效变换: (例)无源电气网络的传递函数:P46 习题 2
7 用梅森公式求系统的闭环传递函数:P38 例 2
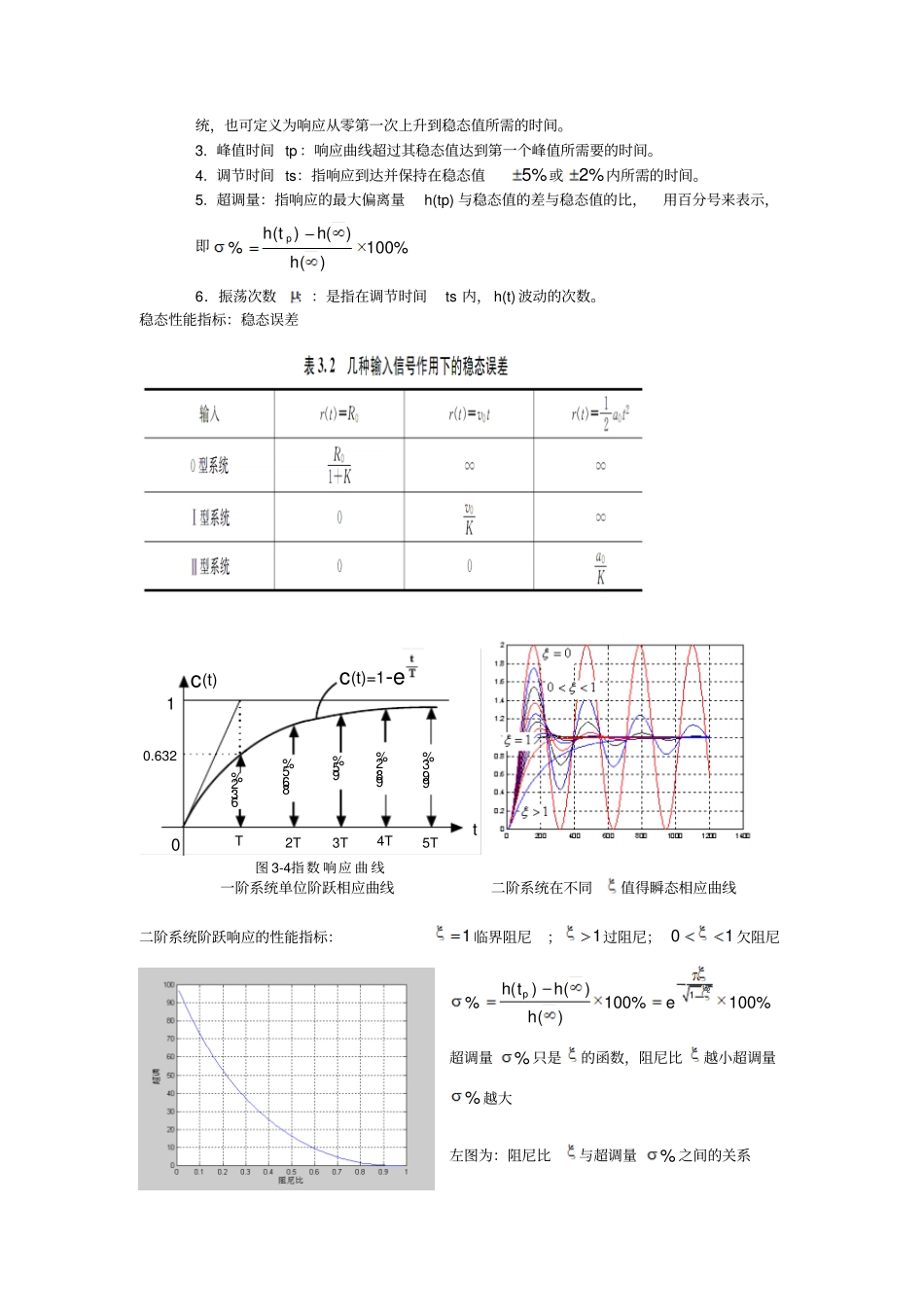
9 第三章:典型输入信号:h(t)t时间 tr上 升峰值时间 t pAB超调量 σ % =AB 100%调节时间 t sh(t)t上升时间 tr调节时间ts动态性能指标:1.延迟时间td :响应曲线第一次达到稳态值的一半所需的时间,叫延迟时间
2.上升时间 tr :响应曲线从稳态值的10%上升到 90%所需的时间
对于有振荡的系1G2G3G1H32HH)(sR)(sC1G1H)(