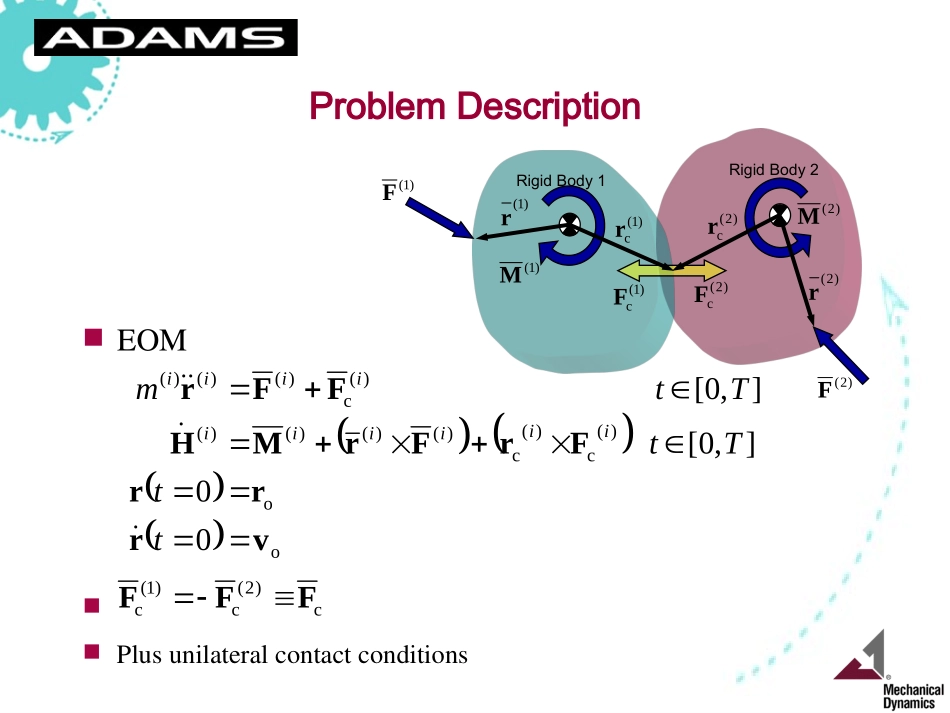
ContactModelinginADAMSToddMcDevitt,Ph.D.,P.E.July25,2000ProblemDescriptionEOMRigidBody2RigidBody1)1(F)2(F)2(M)1(M)1(cF)2(cF)1(cr)2(croo)(c)(c)()()()()(c)()()(00],0[],0[vrrrFrFrMHFFrttTtTtmiiiiiiiiiiPlusunilateralcontactconditionsc)2(c)1(cFFF)1(r)2(rContactKinematicsGapfunctionotherwise1admissableis)(if1)(sign),(),(min)(where,)()(sign)()2()1(tgtgtttgtgtgtgxx)1(x)2(xgRigidBody2RigidBody1R3O)1(n)1(tContactbasis)1(1)(nc)2(1)()1()1(normaloutwardtnFtxtntFFUnilateralNormalContactConstraintsKuhn-TuckercomplimentaryconditionsgNF0gnopenetrationcompressivenormalcontactforce0nFnopenetration,noforce0ngFpersistencycondition0ngFUnilateralNormalContactConstraintsIDEA:variationalinequalityvariationalequalityCHOICES:LagrangeMultipliers•enforcesthecontactconstraintsexactly•difficulttoimplementPenaltyRegularization•introduceserrorsintocontactconstraints•easytoimplement•hasphysicalinterpretationPenaltyRegularizationIntroducethescalarquantitykn.As,theconstrainterror.gnFgkFnnnkconstrainterrornk0IMPACTFunctionIMPACT=111max1n1xx:0xx:x*)0,x,cd,xSTEP(x,x)k(xnngkviscousdampingcontributionRigidBody2RigidBody1nkcknmaxcdnkcIMPACTFunctionIMPACT=111max1n1xx:0xx:x*)0,x,cd,xSTEP(x,x)k(xx)(x11n1x)k(xkworkingrangeunfriendlyderivativen<1n=1n>1NormalContactParametersFortruerigidbodycontactk=aslargeaspossiblewithoutintroducingill-conditioningn=1cmax=0NormalContactParametersTheIMPACTfunctionallowstheanalysttointroducealocal,1Ddeformablecontinuummodelatthecontactinterface.ConsidertheHertziansolutionfortwocontactingspheres:RigidBody2RigidBody1nkcnkc2,1,1)(34k5.1n22/1212121iEhRRRRhhiiiNormalContactParametersAcontactforcemodelwithhysteresisdampingcanalsobeconsidered.RigidBody2RigidBody1nkcnkcimpactpriortorategapgapnrestitutiooftcoefficien4)1(k3n2eeDReference:H.M.LankaraniandP.E.Nikravesh,“ContinuousContactForceModelsforImpactAnalysisinMultibodySystems”,NonlinearDynamics,5:193-207,1994.OutlineIntroduction&MotivationTheoreticalBackgroundContactModelinginADAMS/VIEWWorkshop:PawltoGearToothContactFrictionNumericalIssues&DebuggingContactModelsConcludingRemarks3StepstoAutomaticContactConstraintsDefinegeometry.points,curves,circles,planes,spheresDefinecontactforceelement.Selecttypeofcontactmanifold,i.e,plane,curve,etc.Identifycontactmanifolds.Verifyoutwardnormals.Definecontactforceparameters.Definenormalandfrictionalforceparameters.Workshop:PawltoGearToothContactObjective:IntroducethemechanicsofcreatingcontactconstraintsinADAMS/VIEW.Workshop:PawltoGearToothContactStartADAMS/VIEW.AttheUNIXprompt:•cdppm•adams101-caviewru-sieReadincommandfile.ClickImportafile;thenclickOK.FromtheFileImportdialogbox,•enterppm.cmdintheFiletoReadfield•checktheUpdateScreenbox•unchecktheDisplayModelUponCompletionboxWorkshop:PawltoGearToothContactYouareviewingthegeartooth-parkingpawlinterfaceThemodeliscompleteexceptforacurve-to-curveunilateralcontactconstraintbetweentheREDgeartoothandtheparkingpawl.YOURTASK:createthismissingcontactconstraint.3StepstoAutomaticContactConstraintsDefinegeometry.points,curves,...