§5—2 开环步进式伺服驱动系统 步进式伺服驱动系统是典型的开环控制系统
在此系统中,执行元件是步进电机
它受驱动控制线路的控制,将代表进给脉冲的电平信号直接变换为具有一定方向、大小和速度的机械转角位移,并通过齿轮和丝杠带动工作台移动
由于该系统没有反馈检测环节,它的精度较差,速度也受到步进电机性能的限制
但它的结构和控制简单、容易调整,故在速度和精度要求不太高的场合具有一定的使用价值
一、 步进电机的种类、结构及工作原理 1
步进电机的种类 步进电机的分类方式很多,常见的分类方式有按产生力矩的原理、按输出力矩的大小以及按定子和转子的数量进行分类等
根据不同的分类方式,可将步进电机分为多种类型,如表 5--1所示
表5-1 步进电机的分类 分 类 方 式 具 体 类 型 按力矩产生的原理 (1)反应式:转子无绕组,由被激磁的定子绕组产生反应力矩实现步进运行 (2)激磁式:定、转子均有激磁绕组(或转子用永久磁钢),由电磁力矩实现步进运行 按输出力矩大小 (1)伺服式:输出力矩在百分之几之几至十分之几(N·m)只能驱动较小的负载,要与液压扭矩放大器配用,才能驱动机床工作台等较大的负载 (2)功率式:输出力矩在5-50 N·m以上,可以直接驱动机床工作台等较大的负载 按定子数 (1)单定子式(2)双定子式(3)三定子式(4)多定子式 按各相绕组分布 (1)径向分布式:电机各相按圆周依次排列 (2)轴向分布式:电机各相按轴向依次排列 2
步进电机的结构 目前,我国使用的步进电机多为反应式步进电机
在反应式步进电机中,有轴向分相和径向分相两种,如表5--1所述
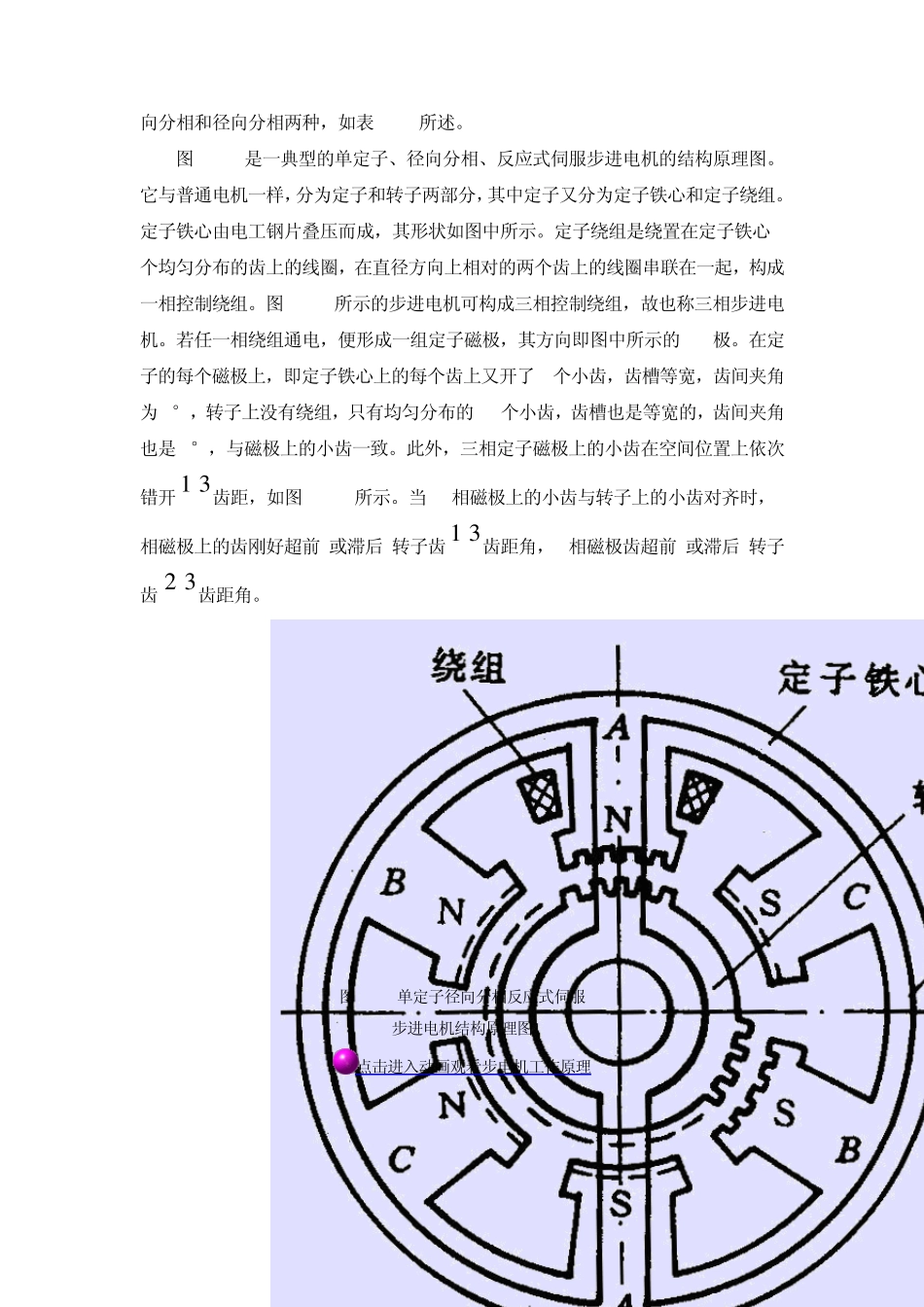
图5--2是一典型的单定子、径向分相、反应式伺服步进电机的结构原理图
它与普通电机一样,分为定子和转子两部分,其中定子又分为定子铁心和定子绕组
定子铁心由电工钢片叠压而成,其形状如图中所示
定子绕组是绕置在定子铁