《计算机仿真及应用B》答卷 学号: 姓名: 班级: 任课老师: 开环直流调速控制系统的仿真 1 、开环直流调速控制系统的组成 开环控制系统是根据给定的控制量进行控制,而被控制量在整个控制过程中对控制量不产生任何影响
对于被控制量相对于其预期值可能出现的偏差,开环控制系统不具备修正能力
而直流调速开环控制系统通常是采用调节电枢电压方案,具体实现在 20 世纪 60 年代晶闸管整流器的应用而采用由晶闸管整流器和电动机(V-M)系统实现开环或闭环控制调速系统
2 、开环直流调速控制系统仿真 (1)基于数学模型的开环直流调速系统仿真
开环直流调速控制系统数学模型
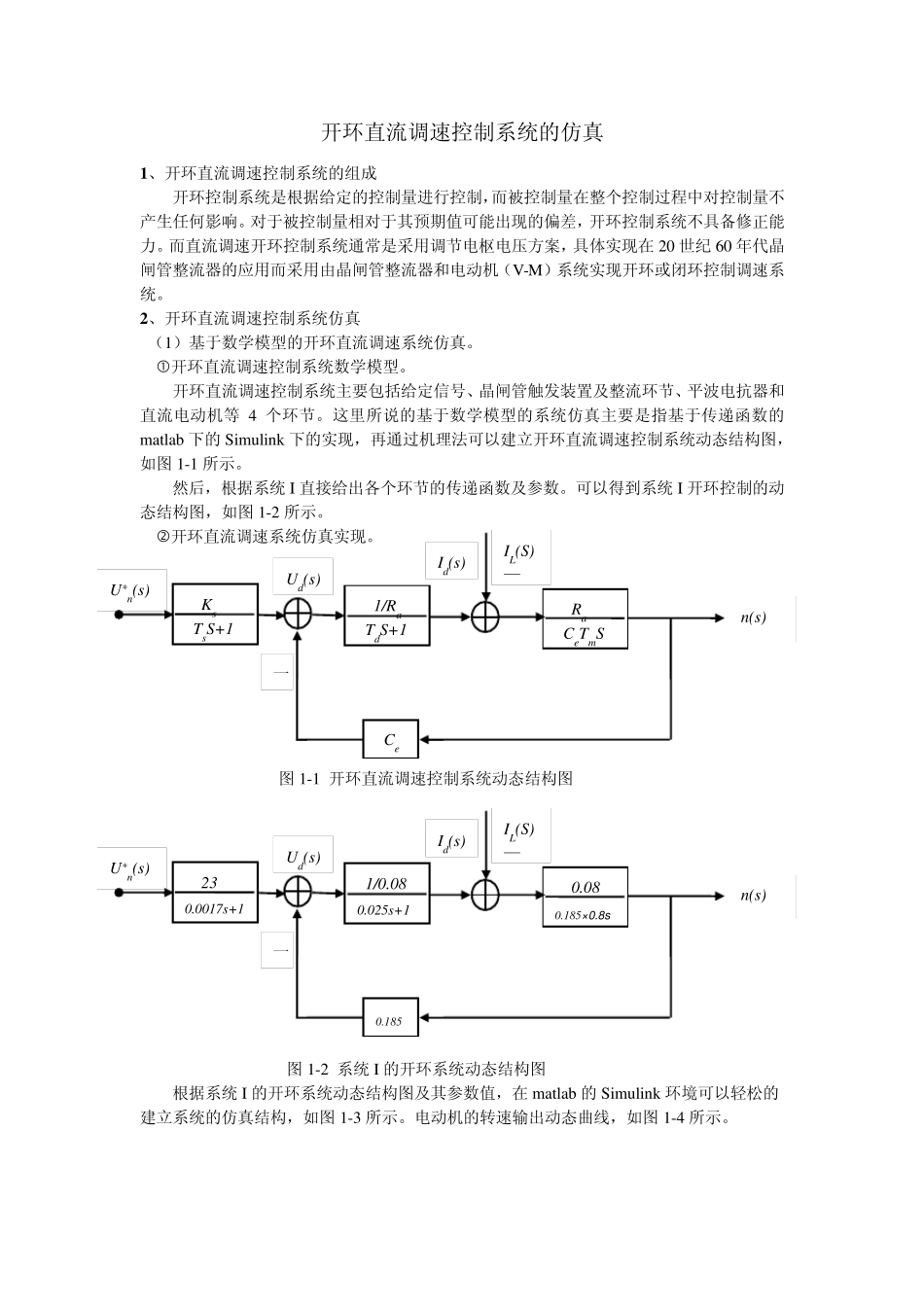
开环直流调速控制系统主要包括给定信号、晶闸管触发装置及整流环节、平波电抗器和直流电动机等 4 个环节
这里所说的基于数学模型的系统仿真主要是指基于传递函数的matlab 下的 Simu link 下的实现,再通过机理法可以建立开环直流调速控制系统动态结构图,如图 1-1 所示
然后,根据系统 I 直接给出各个环节的传递函数及参数
可以得到系统 I 开环控制的动态结构图,如图 1-2 所示
开环直流调速系统仿真实现
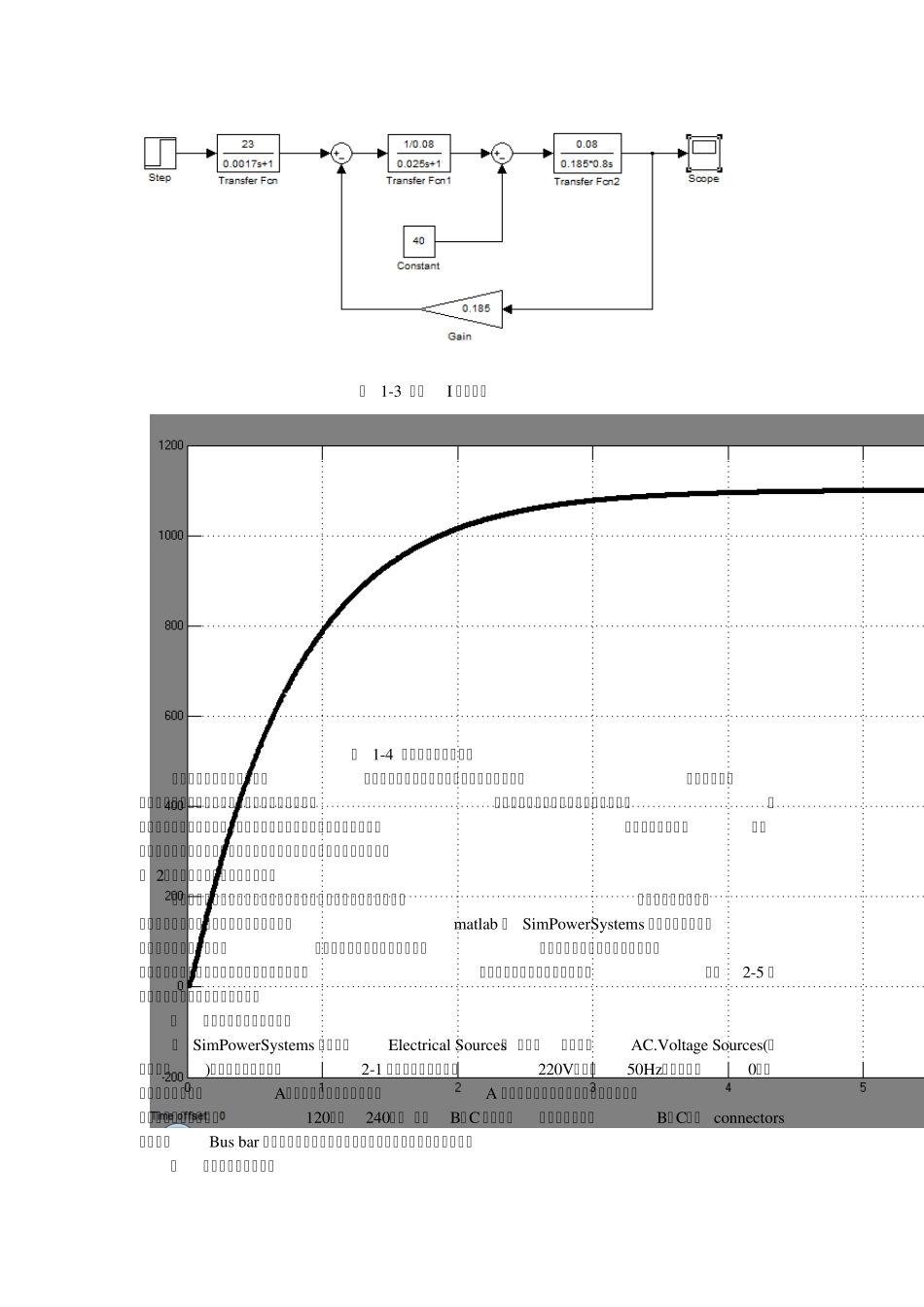
图 1-1 开环直流调速控制系统动态结构图 图 1-2 系统 I 的开环系统动态结构图 根据系统 I 的开环系统动态结构图及其参数值,在 matlab 的 Simu link 环境可以轻松的建立系统的仿真结构,如图 1-3 所示
电动机的转速输出动态曲线,如图 1-4 所示
IL(S) — n(s) U*n(s) 一 1/Ra TdS+1 Ra CeTmS Ce Ks TsS+1 Ud(s) Id(s) IL(S) — n(s) U*n(s) 一 1/0
025s+1 0
185 23 0
0017s+1 Ud(s) Id(s) 图 1-3 系统I 仿真模