数字PID 控制器设计 实验报告 学 院 电子信息学院 专 业 电气工程及其自动化 学 号 姓 名 指导教师 杨奕飞 数字PID 控制器设计报告 一.设计目的 采用增量算法实现该PID 控制器
二.设计要求 掌握 PID 设计方法及 MATLAB 设计仿真
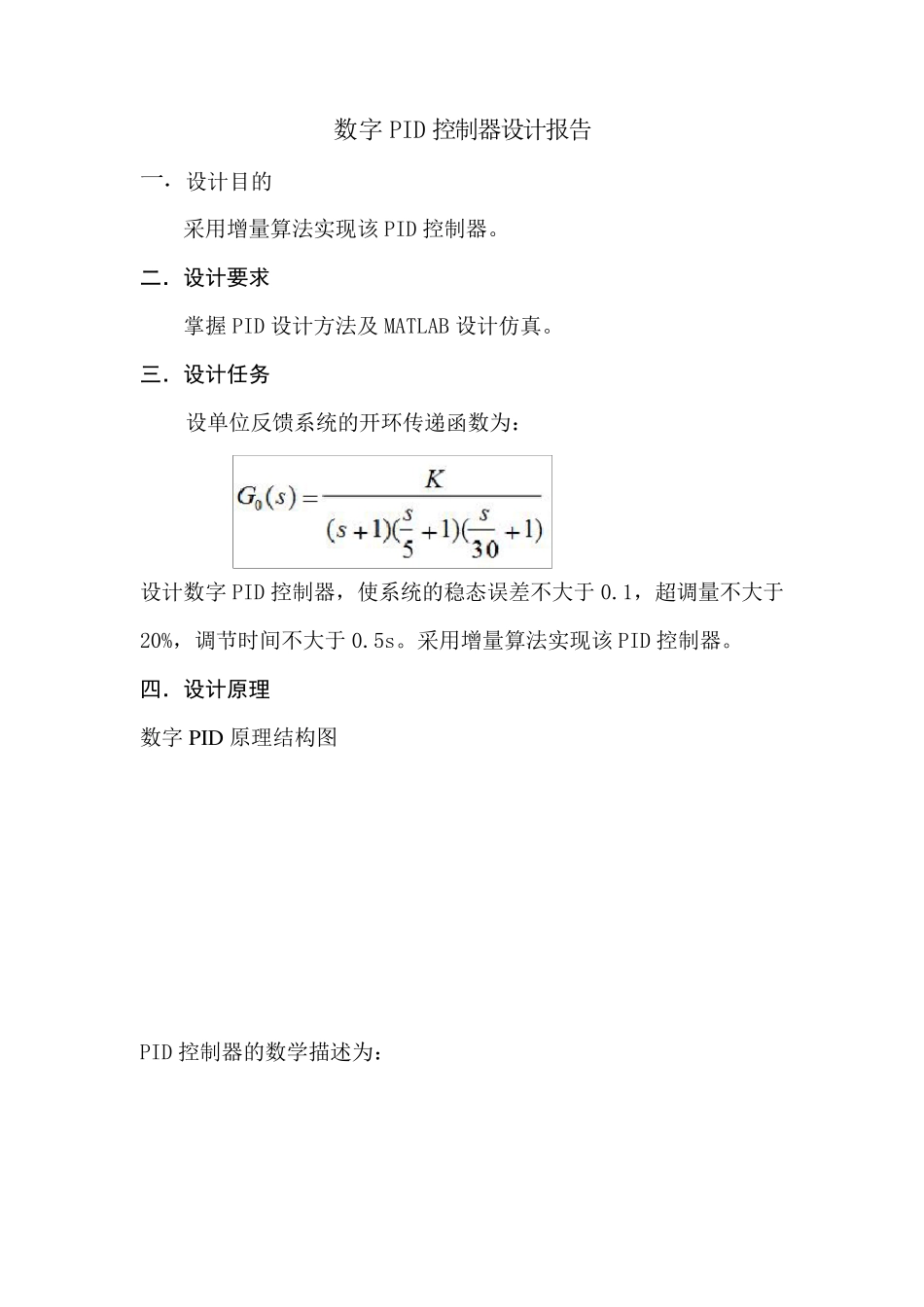
三.设计任务 设单位反馈系统的开环传递函数为: 设计数字PID 控制器,使系统的稳态误差不大于 0
1,超调量不大于20%,调节时间不大于 0
采用增量算法实现该PID 控制器
四.设计原理 数字P ID 原理结构图 PID 控制器的数学描述为: 式中,Kp 为比例系数;T1为积分时间常数;TD为微分时间常数
设u(k)为第K 次采样时刻控制器的输出值,可得离散的PID 表达式为: 使用模拟控制器离散化的方法,将理想模拟PID 控制器D(s)转化为响应的理想数字PID 控制器D(z)
采用后向差分法,得到数字控制器的脉冲传递函数
增量式PID 控制算法 u(k)=u(k-1)+Δu(k) 增量式PID 控制系统框图 五.Matlab 仿真选择数字PID 参数 利用扩充临界比例带法选择数字PID 参数,扩充临界比例带法是以模拟PID 调节器中使用的临界比例带法为基础的一种数字PID 参数的整定方法
其整定步骤如下 1) 选择合适的采样周期 T:,因为Tmin