无刷直流电机原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品
● 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似
电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器
驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等
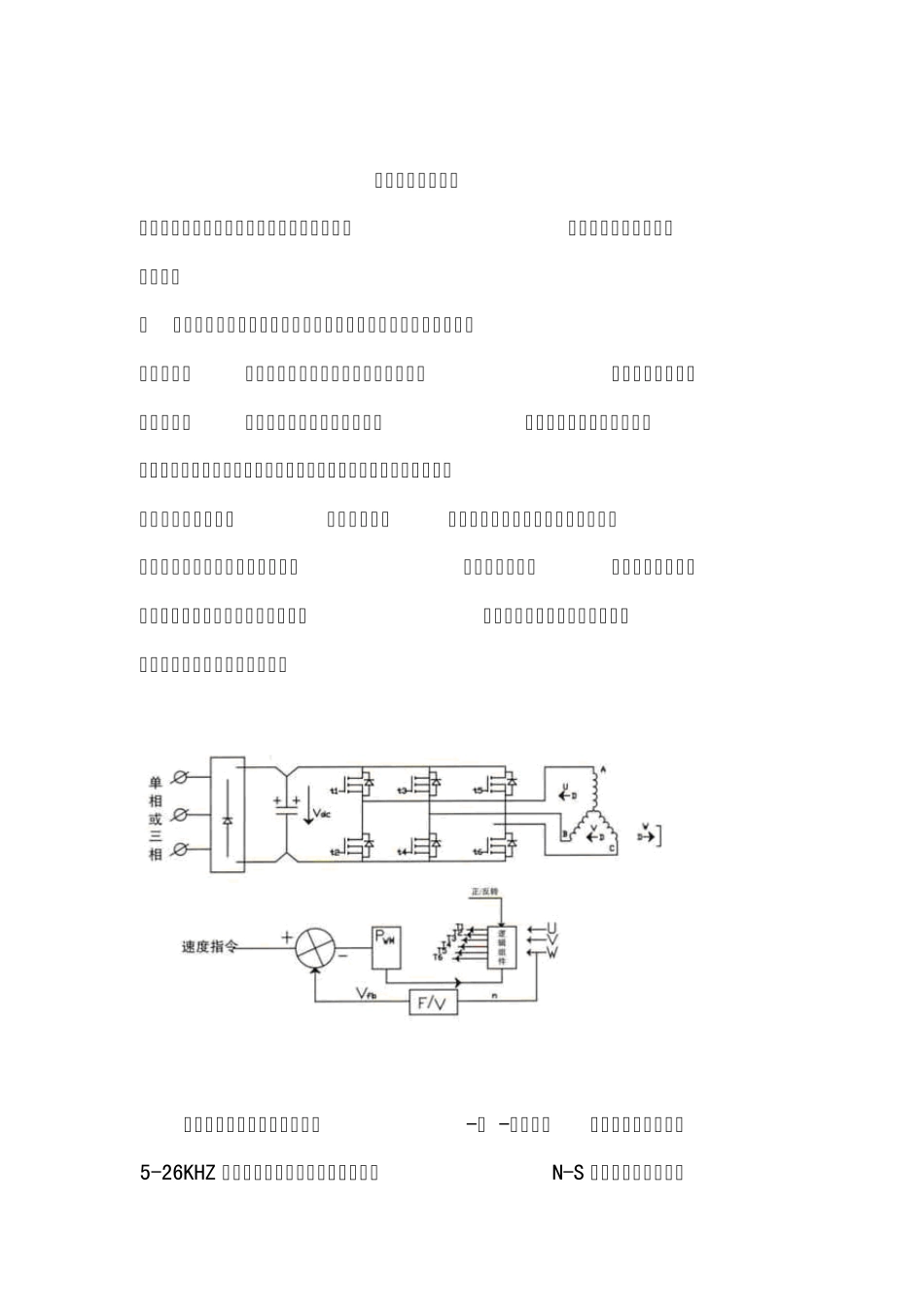
无刷直流电动机的原理简图如图一所示: 主电路是一个典型的电压型交-直 -交电路,逆变器提供等幅等频5-26KHZ 调制波的对称交变矩形波
永磁体N-S 交替交换,使位置传感器产生相位差120°的U、 V、 W 方波,结合正/反转信号产生有效的六状态编码信号:101、 100、 110、 010、 011、 001,通过逻辑组建处理产生T1-T4 导通、T1-T6 导通、T3-T6 导通、T3-T2 导通、T5-T2导通、T5-T4 导通,也就是说将直流母线电压依次加在A+B-、 A+C-、B+C-、 B+A-、 C+A-、 C+B-上,这样转子每转过一对N-S 极,T1-T6 功率管即按固定组合成六种状态的依次导通
每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电度角,转子跟随定子磁场转动相当于60°电度角空间位置,转子在新位置上,使位置传感器U、 V、 W 按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电度角,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转
正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机
● 无刷直流电动机的位置传感器编码