第1 页 曲柄导杆机构的建模与仿真 目 录 一、 曲柄导杆机构的设计要求
1 二、 曲柄导杆机构的建模
1 三、 仿真机构模型并测量获取导杆角度、角速度和角加速度的变化规律
2 四、 根据仿真分析结果,计算机构的行程速比系数
5 学习体会
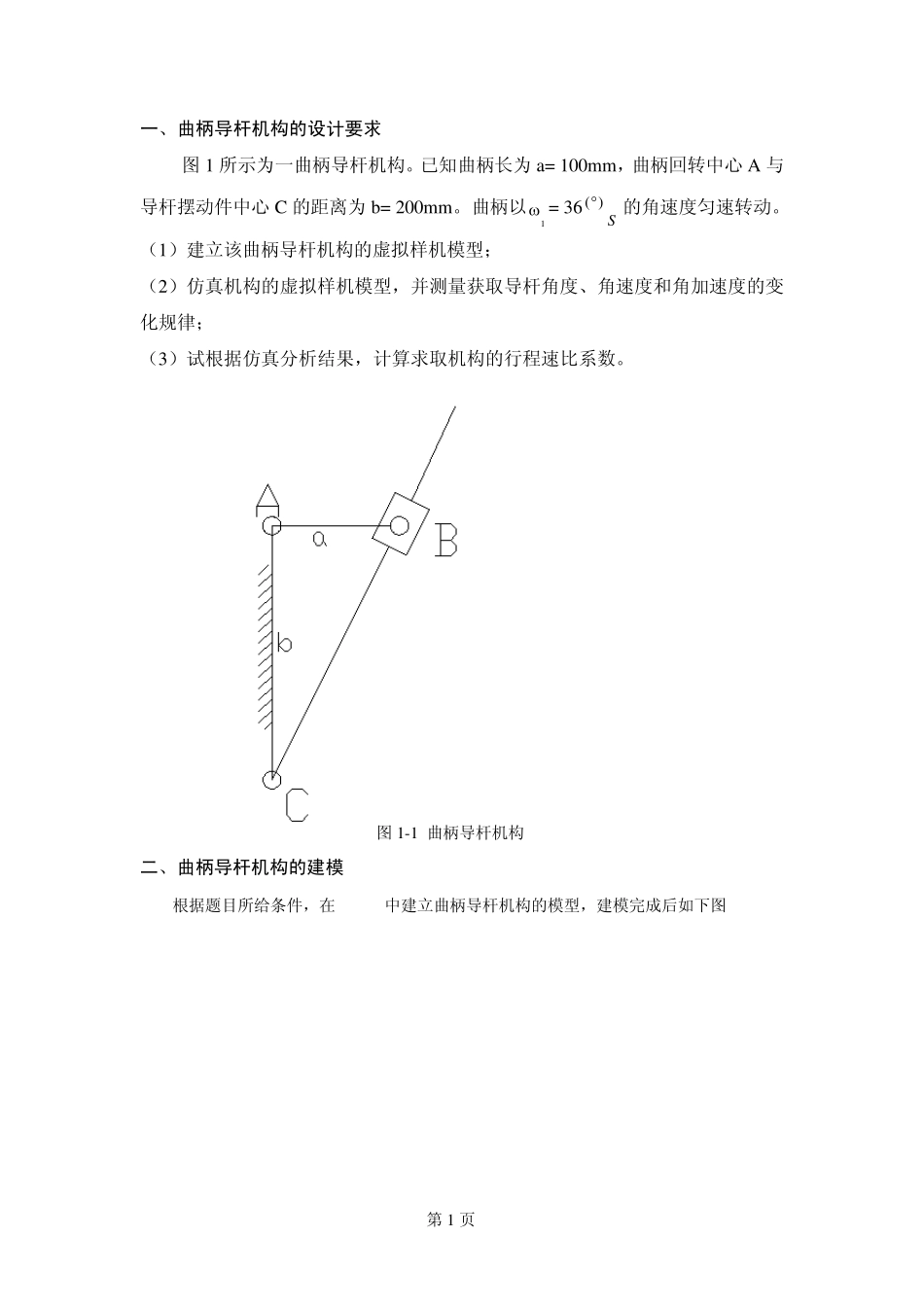
6 第1 页 一、曲柄导杆机构的设计要求 图1 所示为一曲柄导杆机构
已知曲柄长为a= 100m m ,曲柄回转中心A 与导杆摆动件中心C 的距离为b= 200m m
曲柄以1 = 36 ( )S的角速度匀速转动
(1)建立该曲柄导杆机构的虚拟样机模型; (2)仿真机构的虚拟样机模型,并测量获取导杆角度、角速度和角加速度的变化规律; (3)试根据仿真分析结果,计算求取机构的行程速比系数
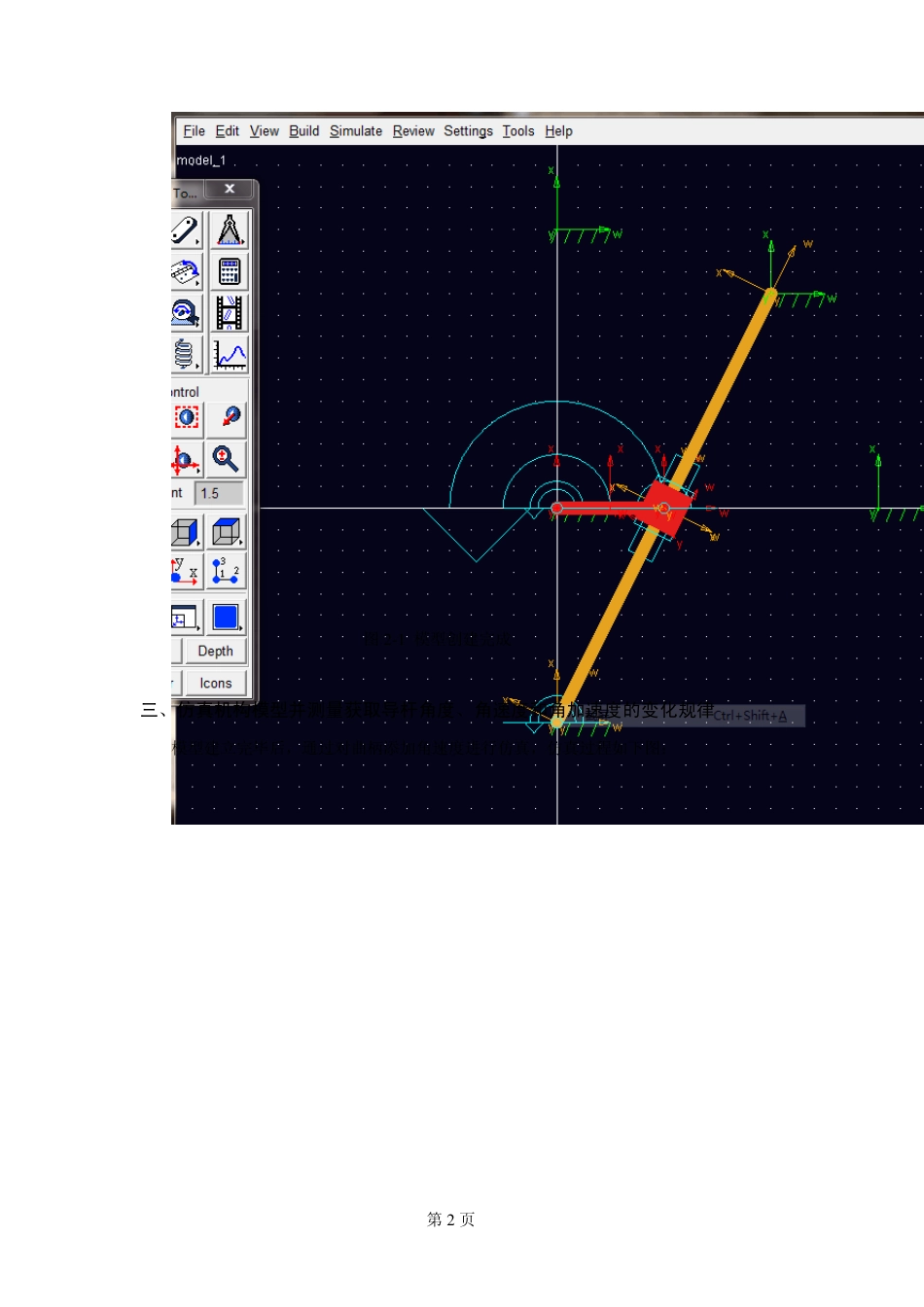
图1-1 曲柄导杆机构 二、曲柄导杆机构的建模 根据题目所给条件,在 ADAMS中建立曲柄导杆机构的模型,建模完成后如下图 第2 页 图2 -1 模型创建完成 三、仿真机构模型并测量获取导杆角度、角速度和角加速度的变化规律 模型建立完毕后,通过对曲柄添加角速度进行仿真,仿真过程如下图: 第3 页 通过仿真得到导杆角度、角速度和角加速的变化规律