系统稳定性的研究的实验报告学院:机械工程学院班级: 09 级过控( 2)班姓名:周军学号: 12009240361 实验三系统稳定性的研究一.目的要求1
验证自动控制系统中:增加开环放大系数使系统的震荡加剧,以致于不稳定
控制系统中时间常数错开,可以提高系统的临界稳定放大倍数
二.实验仪器、设备、工具及材料三.实验原理和设计应用模拟电路来模拟典型三阶系统
线性控制系统稳定的重要条件是:他的微分方程式的特征方程的根都是负实数的复数,亦及:全部根都位于S 复平面的左半面
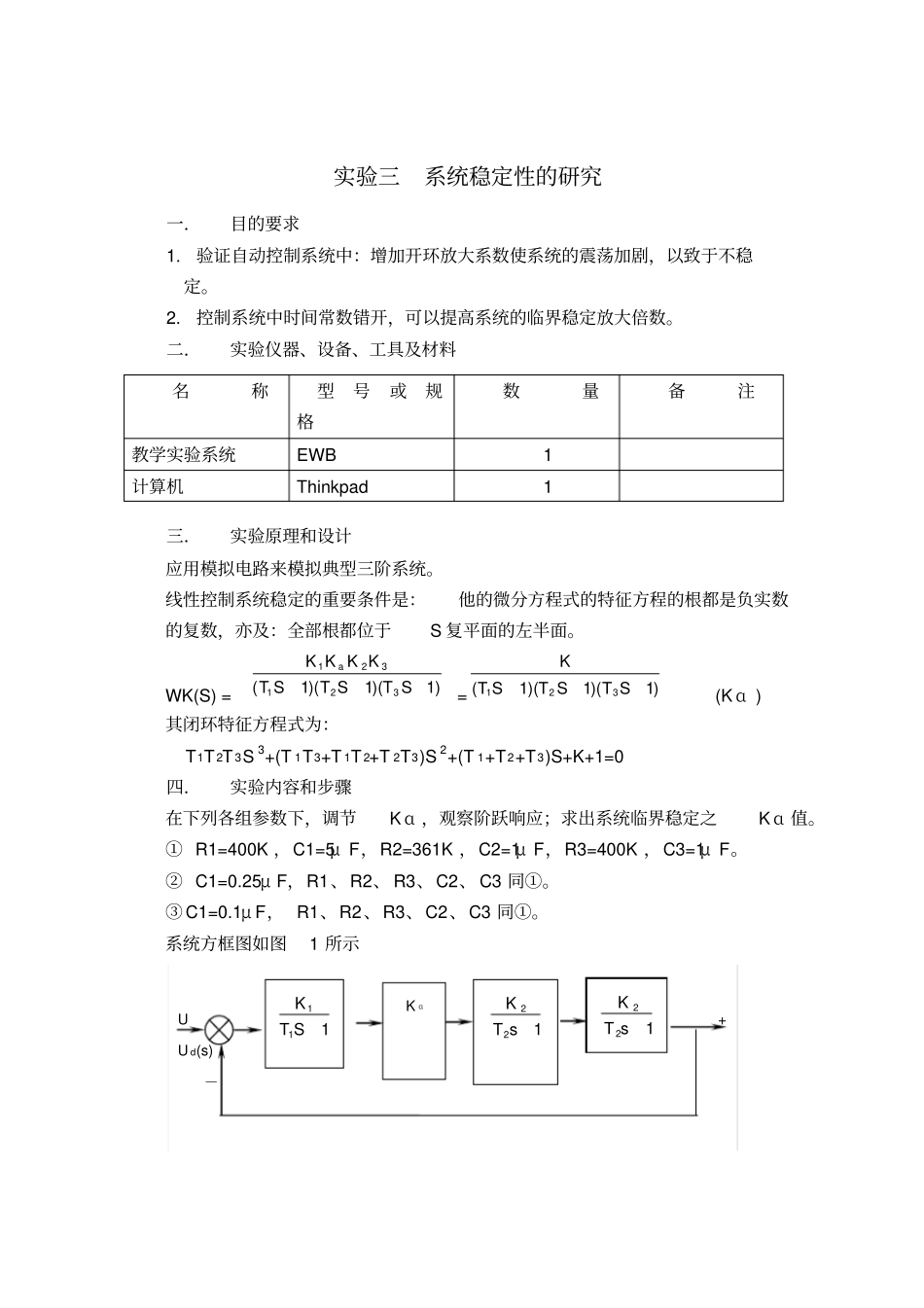
WK(S) = )1)(1)(1(321321STSTSTKKKKa=)1)(1)(1(321STSTSTK(K ɑ ) 其闭环特征方程式为:T1T 2T 3S 3+(T 1T3+T 1T 2+T 2T3)S 2+(T 1+T2+T3)S+K+1=0 四.实验内容和步骤在下列各组参数下,调节K ɑ ,观察阶跃响应;求出系统临界稳定之K ɑ 值
① R1=400K ,C1=5μ F,R2=361K ,C2=1μ F,R3=400K ,C3=1μ F
② C1=0
25μ F,R1、R2、 R3、C2、 C3 同①
③ C1=0
1μ F, R1、R2、R3、C2、C3 同①
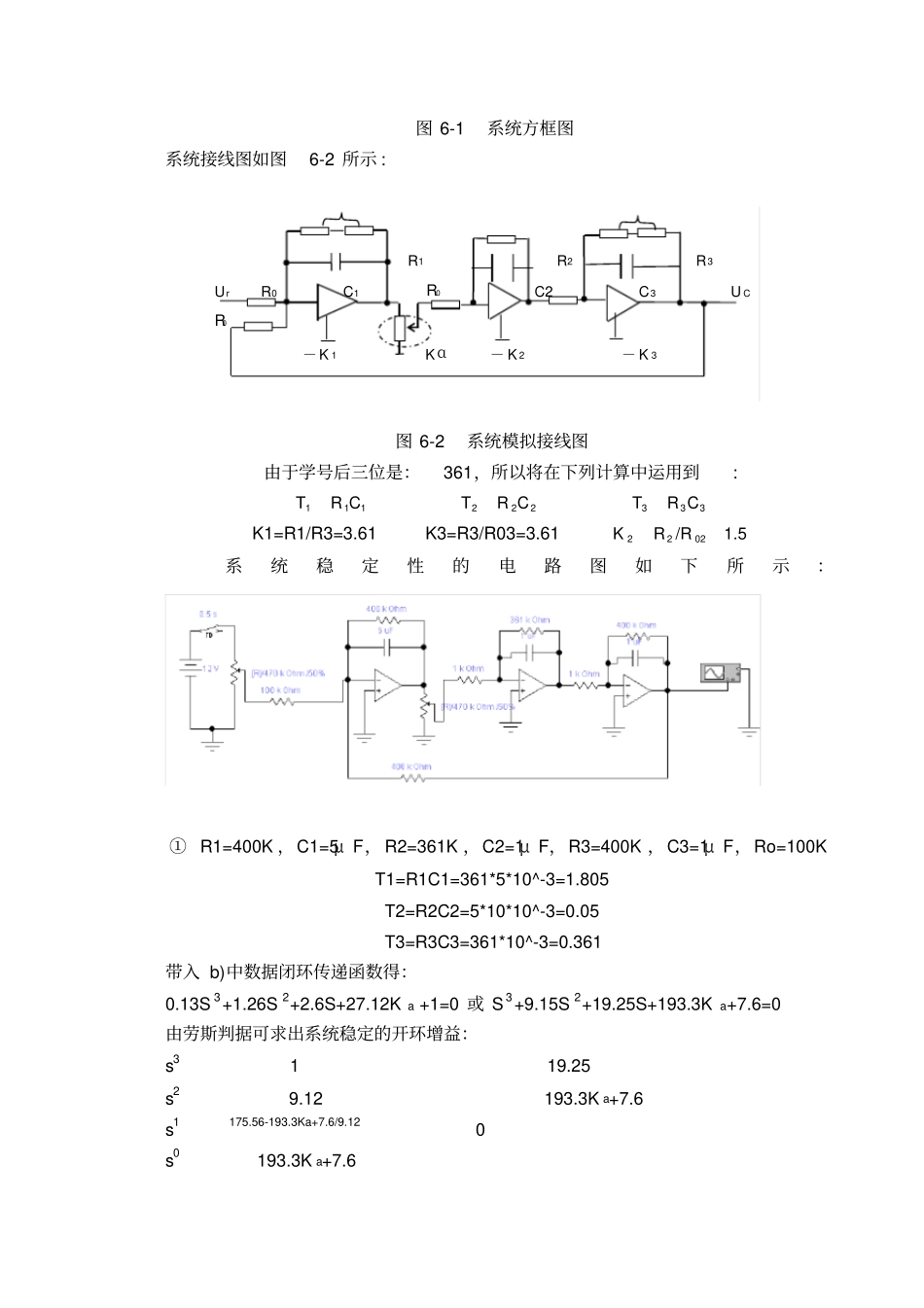
系统方框图如图1 所示名称型号或规格数量备注教学实验系统EWB 1 计算机Thinkpad 1 U + U d(s) -111STKK ɑ1sTK221sTK22图 6-1 系统方框图系统接线图如图6-2 所示 : 图 6-2 系统模拟接线图由于学号后三位是:361,所以将在下列计算中运用到: 111TR C222TR C333TR CK1=R1/R3=3
61 K3=R3/R03=3
61 2202KR /R1
5系统稳定性的电路图如下所示:① R1=400K ,C1=5μ F, R2=361K ,C2=1μ F,R3=400K ,C3