百度文库- 让每个人平等地提升自我11 实验四线性定常系统的稳态误差一、实验目的1.通过本实验,理解系统的跟踪误差与其结构、参数与输入信号的形式、幅值大小之间的关系;2.研究系统的开环增益K 对稳态误差的影响
二、实验原理控制系统的方框图如图4-1 所示
其中G(S)为系统前向通道的传递函数,H(S)为其反馈通道的传递函数
图 4-1 控制系统的方框图由图 4-1 求得)()()(11)(SRSHSGSE(4-1)由上式可知,系统的误差E(S)不仅与其结构和参数有关,而且也与输入信号R(S)的形式和大小有关
如果系统稳定, 且误差的终值存在,则可用下列的终值定理求取系统的稳态误差:)(lim0SSEesss(4-2)本实验就是研究系统的稳态误差与上述因素间的关系
下面叙述0 型、 I 型、 II 型系统对三种不同输入信号所产生的稳态误差sse
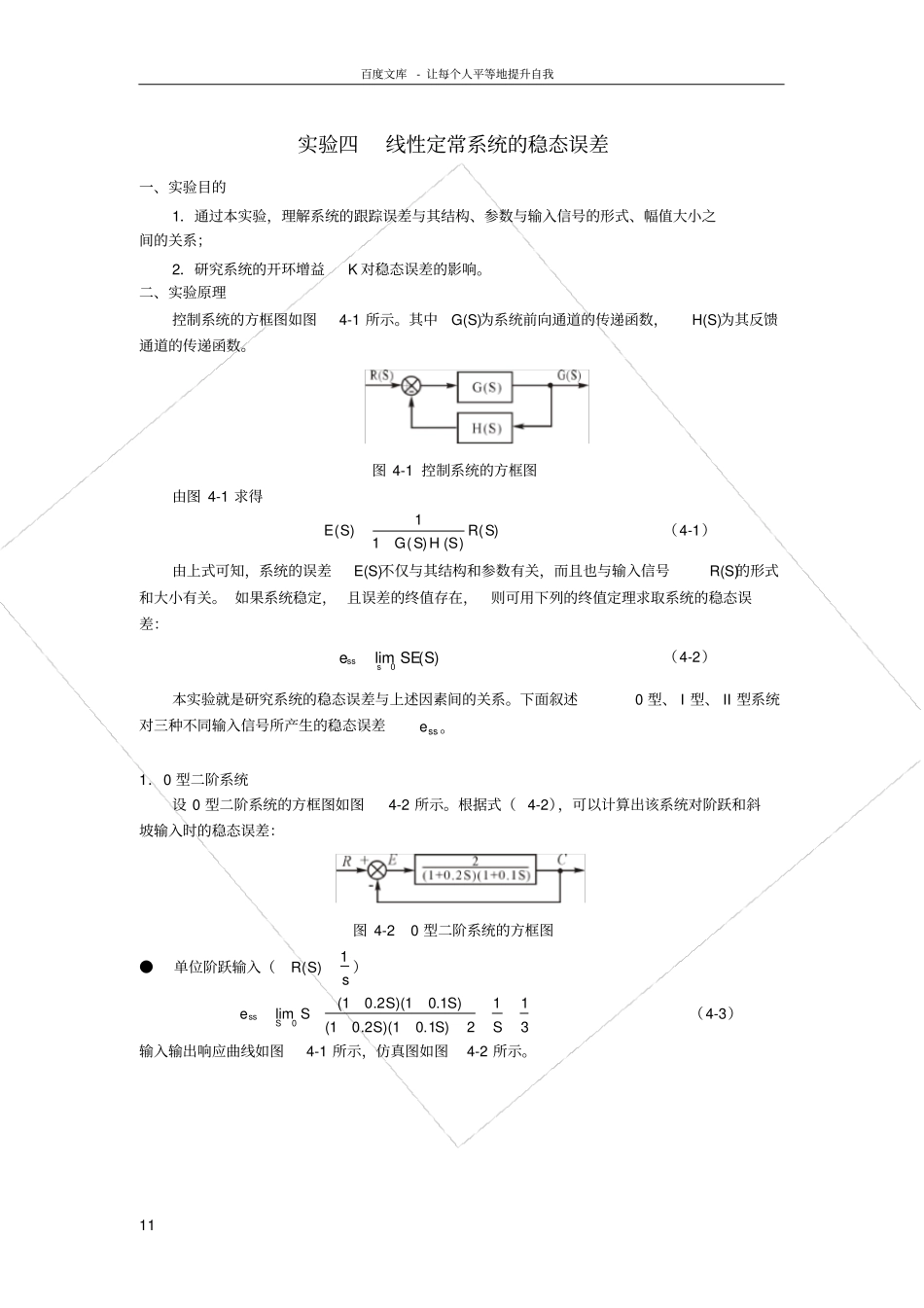
1.0 型二阶系统设 0 型二阶系统的方框图如图4-2 所示
根据式( 4-2),可以计算出该系统对阶跃和斜坡输入时的稳态误差:图 4-2 0 型二阶系统的方框图●单位阶跃输入(sSR1)()3112)1
01(lim0SSSSSSeSss(4-3)输入输出响应曲线如图4-1 所示,仿真图如图4-2 所示
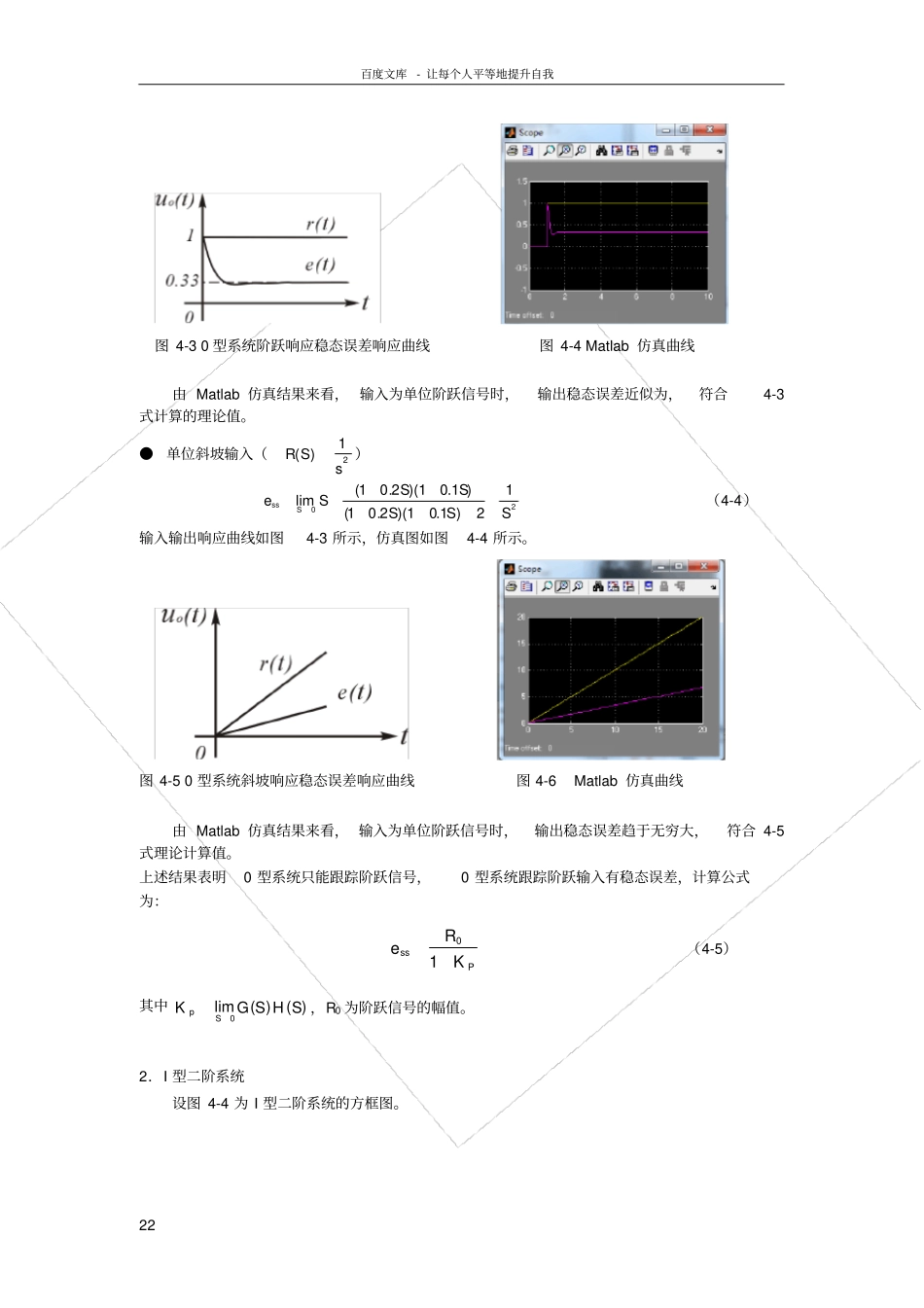
百度文库- 让每个人平等地提升自我22 图 4-3 0 型系统阶跃响应稳态误差响应曲线图 4-4 Matlab 仿真曲线由 Matlab 仿真结果来看, 输入为单位阶跃信号时,输出稳态误差近似为,符合4-3式计算的理论值
●单位斜坡输入(21)(sSR)2012)1
01(limSSSSSSeSss(4-4)输入输出响应曲线如图4-3 所示,仿真图如图4-4 所示
图 4-5 0 型系统斜坡响应稳态误差响应曲线图 4-6 Matlab 仿真曲线由 Matlab