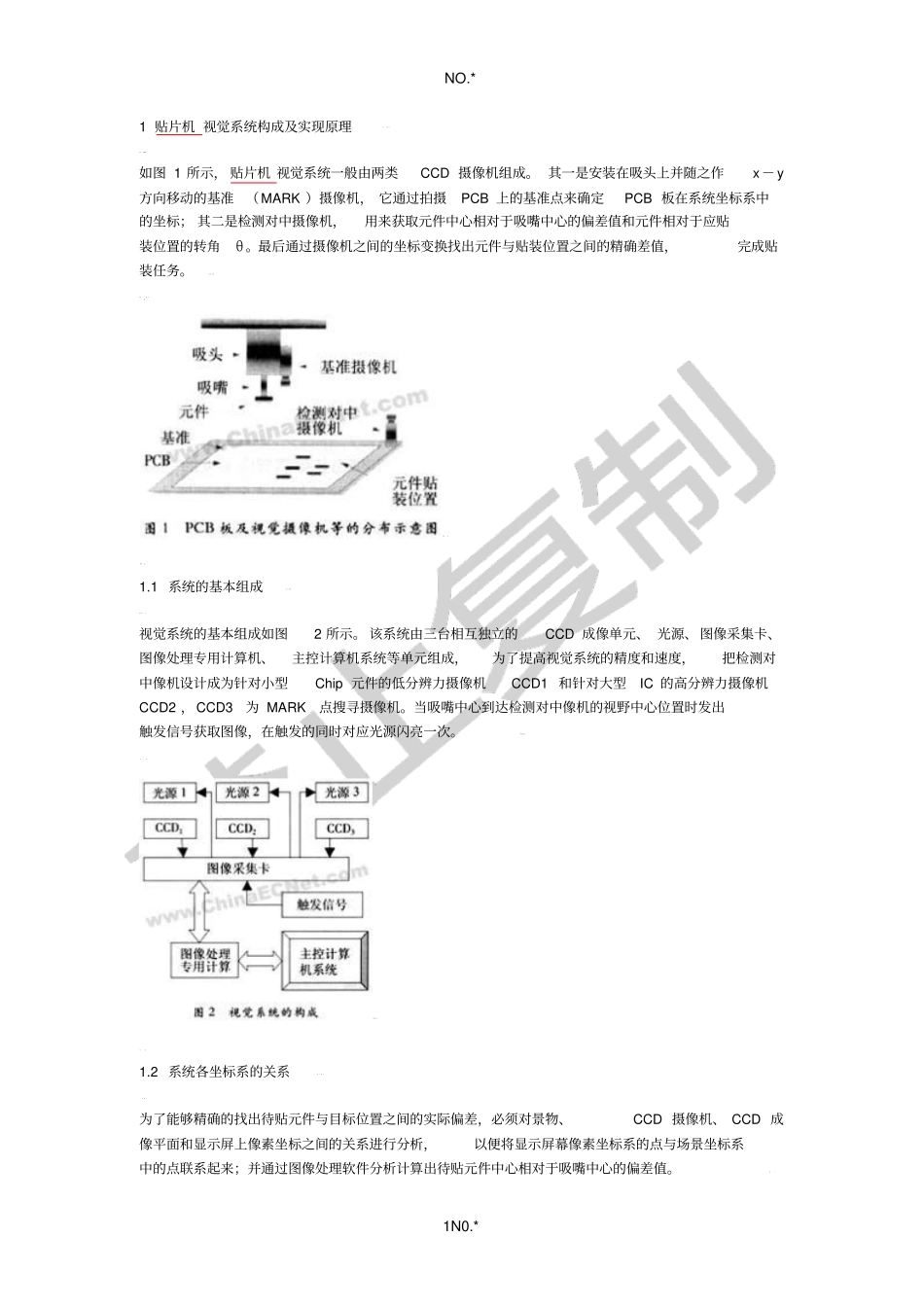
* 1 贴片机 视觉系统构成及实现原理栶啑厔O1k敿觫燲如图 1 所示, 贴片机 视觉系统一般由两类CCD 摄像机组成
其一是安装在吸头上并随之作x-y方向移动的基准(MARK )摄像机, 它通过拍摄PCB 上的基准点来确定PCB 板在系统坐标系中的坐标; 其二是检测对中摄像机,用来获取元件中心相对于吸嘴中心的偏差值和元件相对于应贴装位置的转角θ
最后通过摄像机之间的坐标变换找出元件与贴装位置之间的精确差值,完成贴装任务
m 稃龌w 剬坴傒鰂觠2l,1
1 系统的基本组成閥姉岪YhY
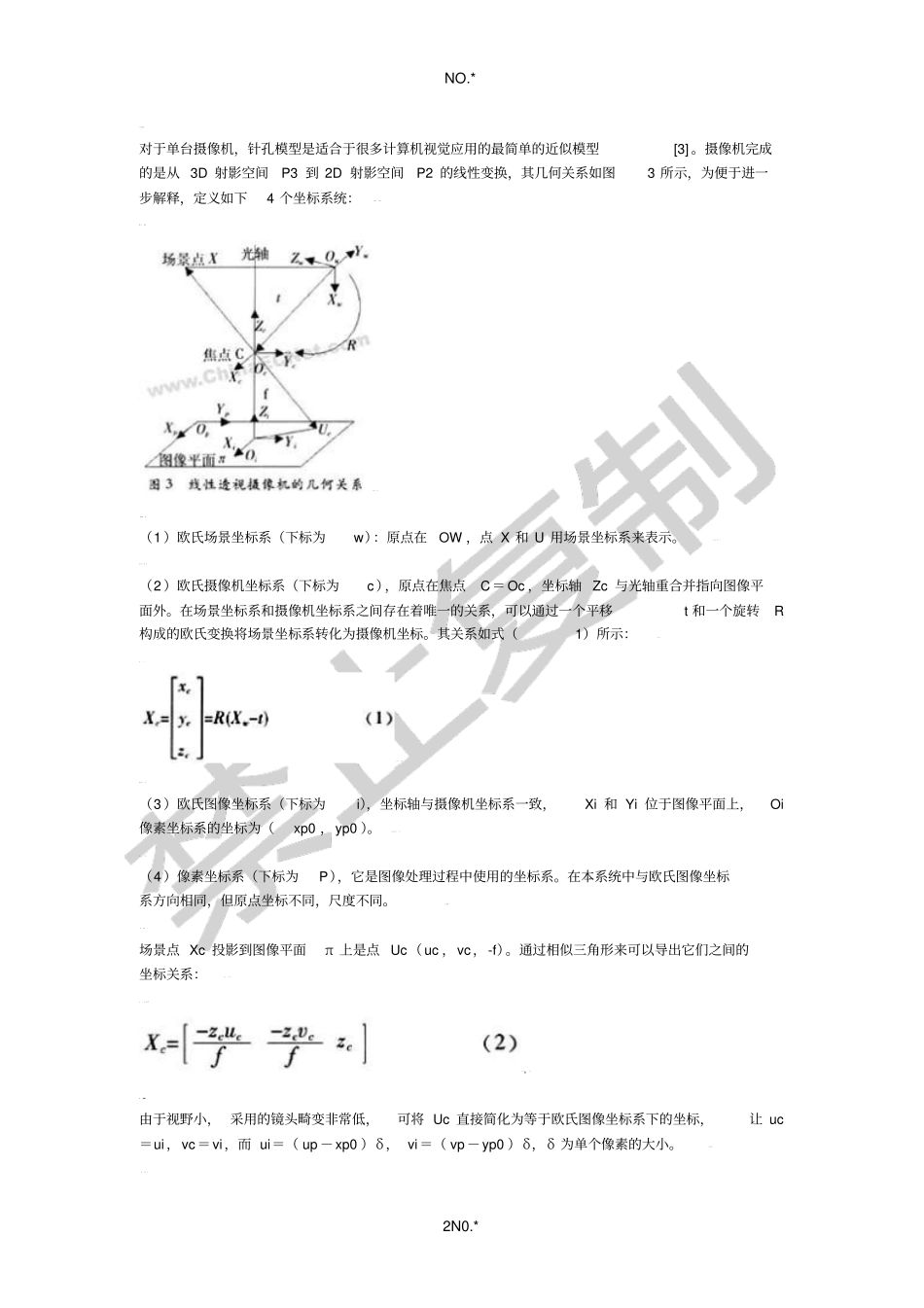
Lj悻视觉系统的基本组成如图2 所示
该系统由三台相互独立的CCD 成像单元、 光源、图像采集卡、图像处理专用计算机、主控计算机系统等单元组成,为了提高视觉系统的精度和速度,把检测对中像机设计成为针对小型Chip 元件的低分辨力摄像机CCD1 和针对大型IC 的高分辨力摄像机CCD2 ,CCD3为 MARK点搜寻摄像机
当吸嘴中心到达检测对中像机的视野中心位置时发出触发信号获取图像,在触发的同时对应光源闪亮一次
蛴挅熧旦檐鮯嵅啍杈哑|x
2 系统各坐标系的关系沏*J嫯^
韕O 为了能够精确的找出待贴元件与目标位置之间的实际偏差,必须对景物、CCD 摄像机、 CCD 成像平面和显示屏上像素坐标之间的关系进行分析,以便将显示屏幕像素坐标系的点与场景坐标系中的点联系起来;并通过图像处理软件分析计算出待贴元件中心相对于吸嘴中心的偏差值
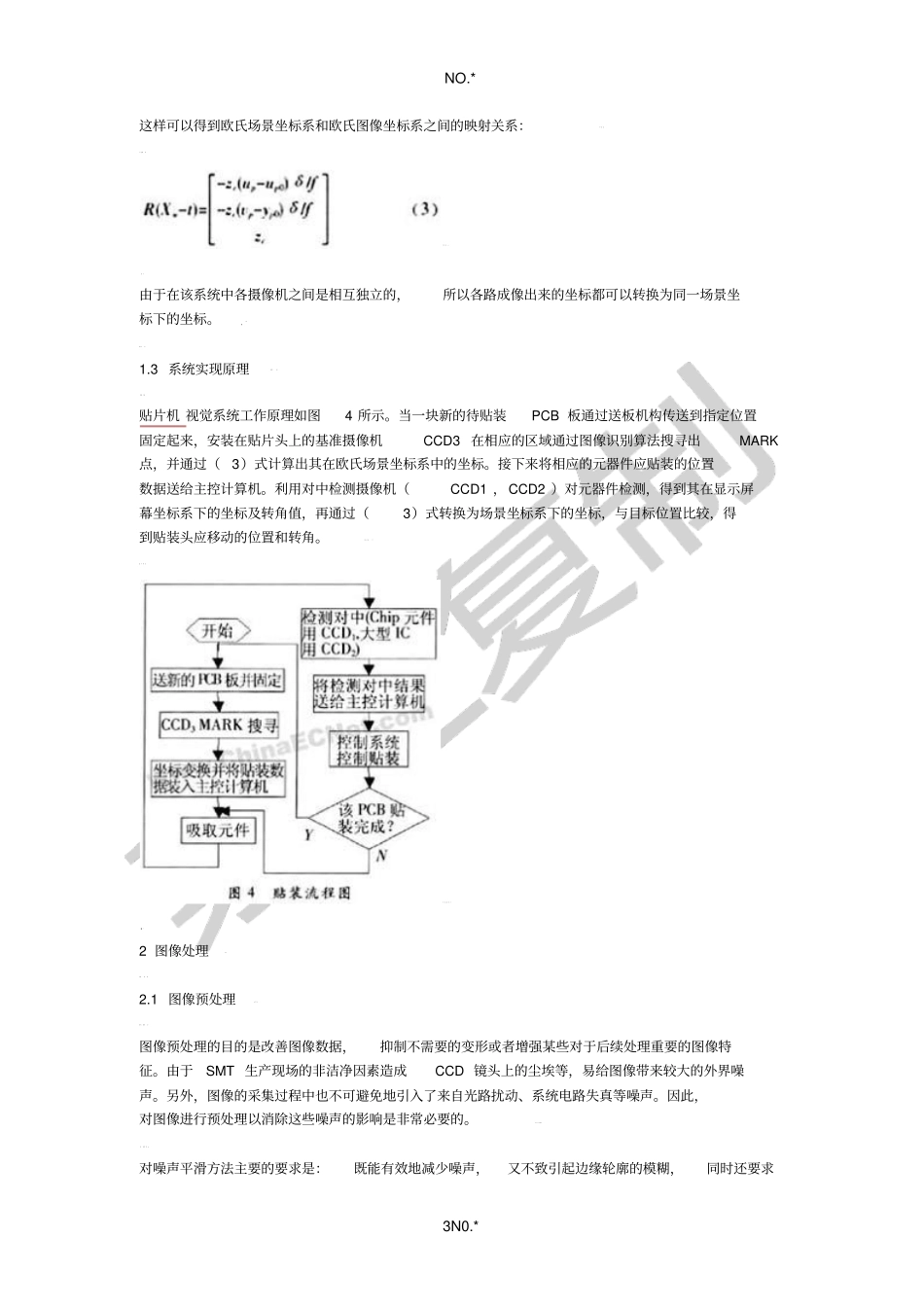
4嗒蒔噙对于单台摄像机,针孔模型是适合于很多计算机视觉应用的最简单的近似模型[3]
摄像机完成的是从 3D 射影空间P3 到 2D 射影空间P2 的线性变换,其几何关系如图3 所示,为便于进一步解释,定义如下4 个坐标系统:譈鹤棤咞闣
襤蚦鵦劐(1 )欧氏场景坐标系