1 引言在微机控制系统的模拟输入信号中,一般均含有各种噪声和干扰,他们来自被测信号源本身、传感器、外界干扰等
为了进行准确测量和控制,必须消除被测信号中的噪声和干扰
噪声有 2 大类:一类为周期性的,其典型代表为 50 Hz 的工频干扰,对于这类信号,采用积分时间等于 20 ms 整倍数的双积分 A/D 转换器,可有效地消除其影响;另一类为非周期的不规则随机信号,对于随机干扰,可以用数字滤波方法予以削弱或滤除
所谓数字滤波,就是通过一定的计算或判断程序减少干扰信号在有用信号中的比重,因此他实际上是一个程序滤波
数字滤波器克服了模拟滤波器的许多不足,他与模拟滤波器相比有以下优点:(1)数字滤波器是用软件实现的,不需要增加硬设备,因而可靠性高、稳定性好,不存在阻抗匹配问题
(2)模拟滤波器通常是各通道专用,而数字滤波器则可多通道共享,从而降低了成本
(3)数字滤波器可以对频率很低(如 0
01 Hz)的信号进行滤波,而模拟滤波器由于受电容容量的限制,频率不可能太低
(4)数字滤波器可以根据信号的不同,采用不同的滤波方法或滤波参数,具有灵活、方便、功能强的特点
2 常用数字滤波算法数字滤波器是将一组输入数字序列进行一定的运算而转换成另一组输出数字序列的装置
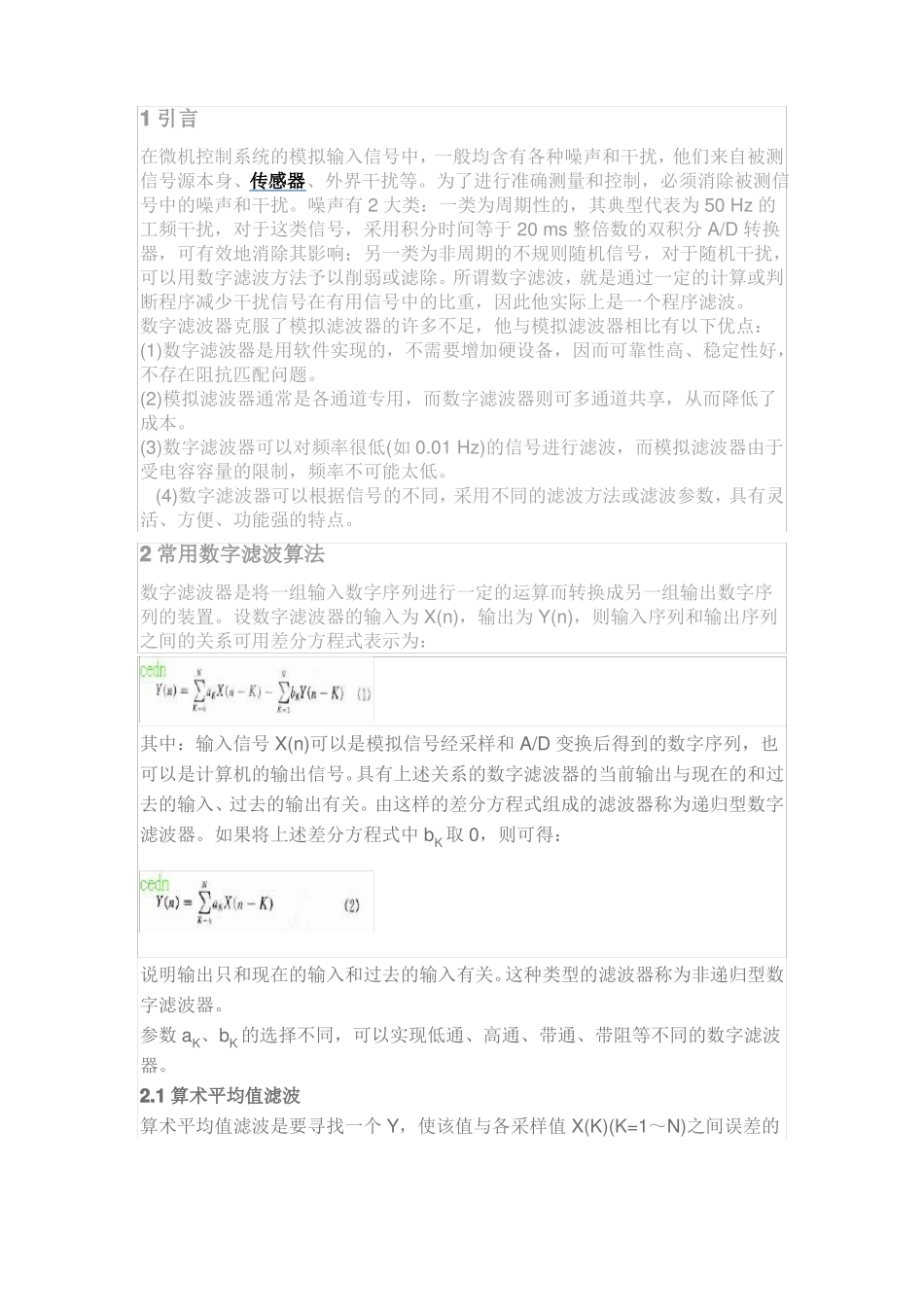
设数字滤波器的输入为 X(n),输出为 Y(n),则输入序列和输出序列之间的关系可用差分方程式表示为:其中:输入信号 X(n)可以是模拟信号经采样和 A/D 变换后得到的数字序列,也可以是计算机的输出信号
具有上述关系的数字滤波器的当前输出与现在的和过去的输入、过去的输出有关
由这样的差分方程式组成的滤波器称为递归型数字滤波器
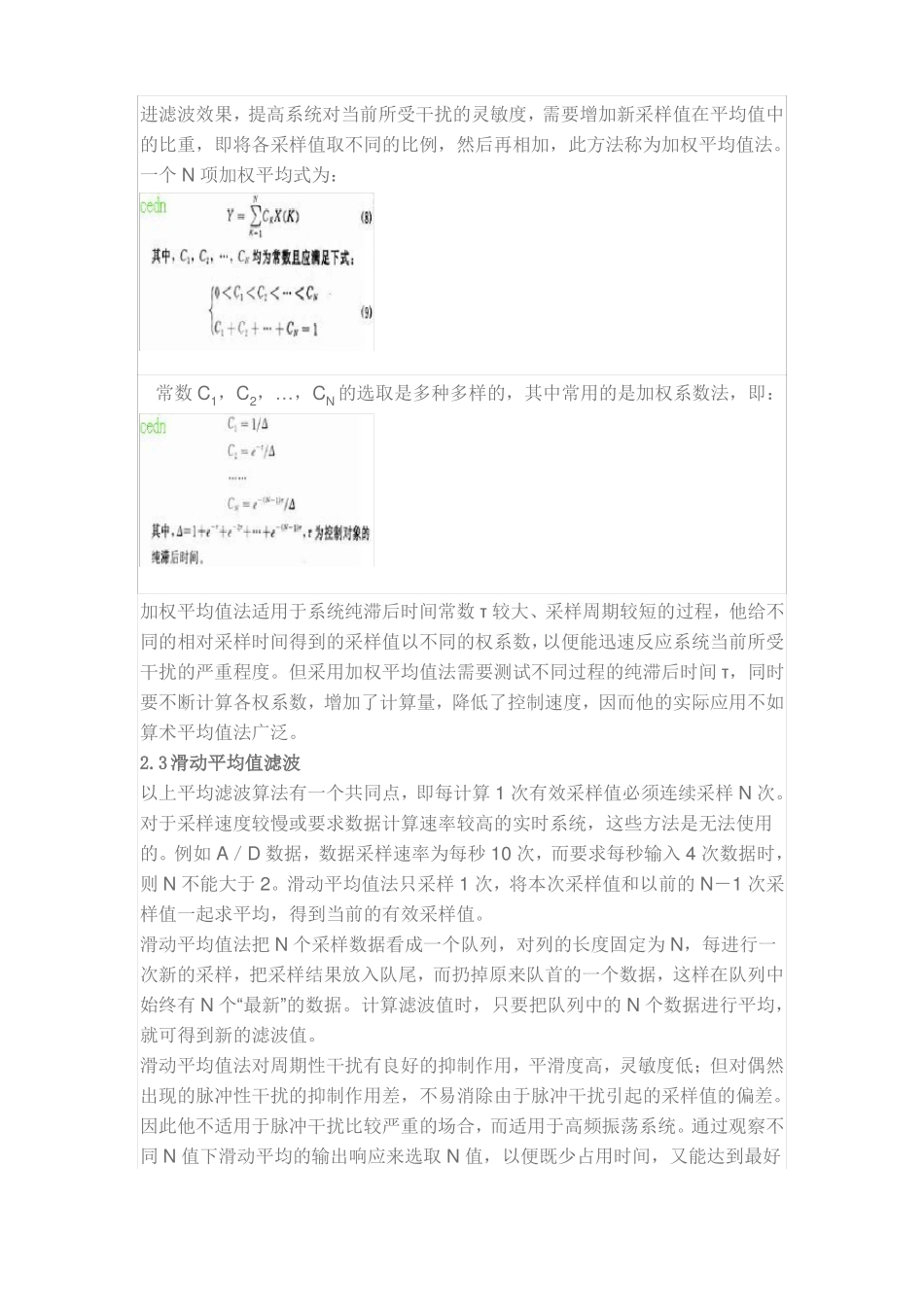
如果将上述差分方程式中 bK 取 0,则可得:说明输出只和现在的输入和过去的输入有关
这种类型的滤波器称为非递归型数字滤波器
参数 aK、bK 的选择不同,可以实现低通、高通、带通、带阻等不同的数字滤