人力式平稳爬楼轮椅设计说明书 组成员: 指导教师 : 职称 : 申请时间: 2010 年 12 月 27 日 目录 一、 设计的目的和意义…………………………………………3 二、 问题提出……………………………………………………4 三、 设计方案选择………………………………………………5 四、 机构尺寸设计………………………………………………7 五、 构件三维造型………………………………………………9 六、 运动仿真分析集成…………………………………………11 七、 设计总结……………………………………………………12 八、 参考文献……………………………………………………12 人力式平稳爬楼轮椅 一、设计的背景和意义 高龄人群以及下肢残障者的最大障碍是步行能力的减弱甚至缺失, 他们不仅丧失行动力,更需要有劳动能力的人来加以护理
目前,大部分年老体弱者及肢体伤残者都会选择轮椅作为他们的代步工具,并且大都需要家人或护理人员伴随协助轮椅的使用
然而,普通轮椅无法攀登楼梯,从而限制了轮椅使用者的活动范围,影响其参与社会生活
尤其是国内城市以多层公寓式楼房居多,电梯并没有普及到所有的居民住宅,这给轮椅乘坐者造成诸多不便
为了缓解上述弱势群体因为比例显著增加而给社会经济、医疗护理各方面带来的巨大压力,更好的关怀老年人、残疾人的生活,改善他们的生活质量,除了增加房屋和各种公共建筑设施的无障碍设计,扩大轮椅的使用范围之外,改进现有的普通轮椅,使其兼备平地行驶以及爬越楼梯障碍两种功能,成为更行之有效、立竿见影的措施
因此,为了解决上述需求,给老年人和残疾人提供性能优越的代步工具,解决楼梯对他们生活造成的不便,同时考虑使用者的经济承受能力,研究一种价格适宜、平稳安全的爬楼梯装置具有重大的意义和实用价值
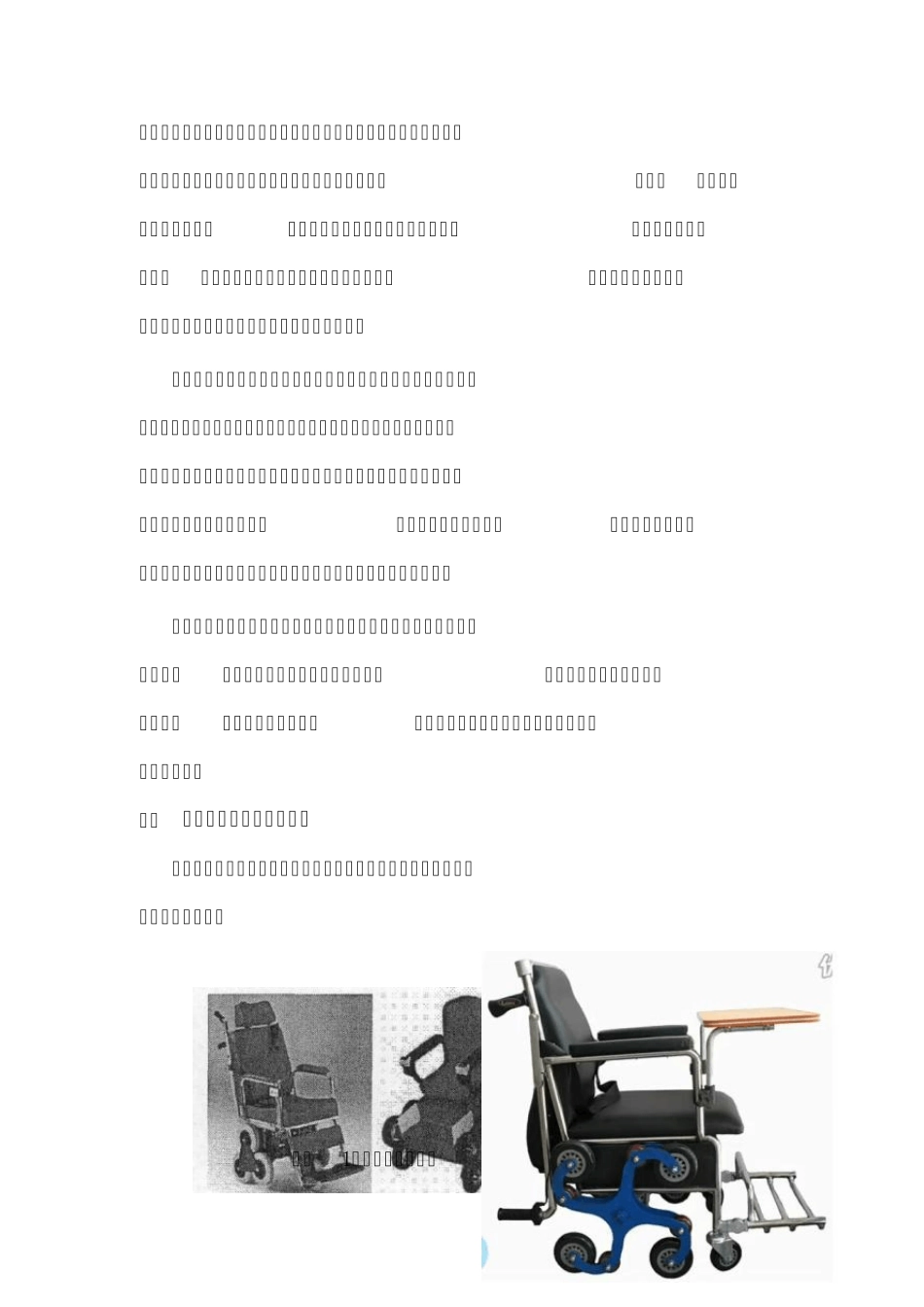
二、现有产品分析及产品简介 目前市场上的爬楼轮椅采用的主要是两种爬楼方式——履带式和