考虑以下系统 uxX102101110221 xy001 对系统设计一个状态反馈控制器使得闭环阶跃响应的超调量小于5%,且在稳态值1%范围的调节时间小于4
○1 主导二阶极点方法配置极点 分析: 超调量小于5%,即 %521e 算得 69
0 稳态值1%范围的调节时间小于4
6S,即 6
4st 1 下面首先对系统的能控性进行判断,以编程方式实现 a=[-1 -2 -2;0 -1 1;1 0 -1]; b=[2;0;1]; %输入a,b矩阵 q=[b a*b a^2*b] rank(q) 计算结果为 511010042q q 的秩为 3 因此该系统为完全能控型系统,在满足系统要求的前提下,理论上能任意配置期望极点 下面根据具体的求解思路进行编程求解反馈控制器k g=poly(a); %求原系统的特征方程 a2=g(2);a1=g(3);a0=g(4); w=[1 0 0;a2 1 0;a1 a2 1]; q1=[a^2*b a*b b]; p=q1*w; %求解转换矩阵 deta=1; zeta=0
75; wn=deta/zeta; %输入满足条件的ζ 和δ den=conv([1 4],[1 2*deta wn^2]); %输入期望极点(-4,-1±0
88i) aa2=den(2);aa1=den(3);aa0=den(4); k=[aa0-a0 aa1-a1 aa2-a2]; k1=k*(inv(p)) %输出配置矩阵k 得到0444
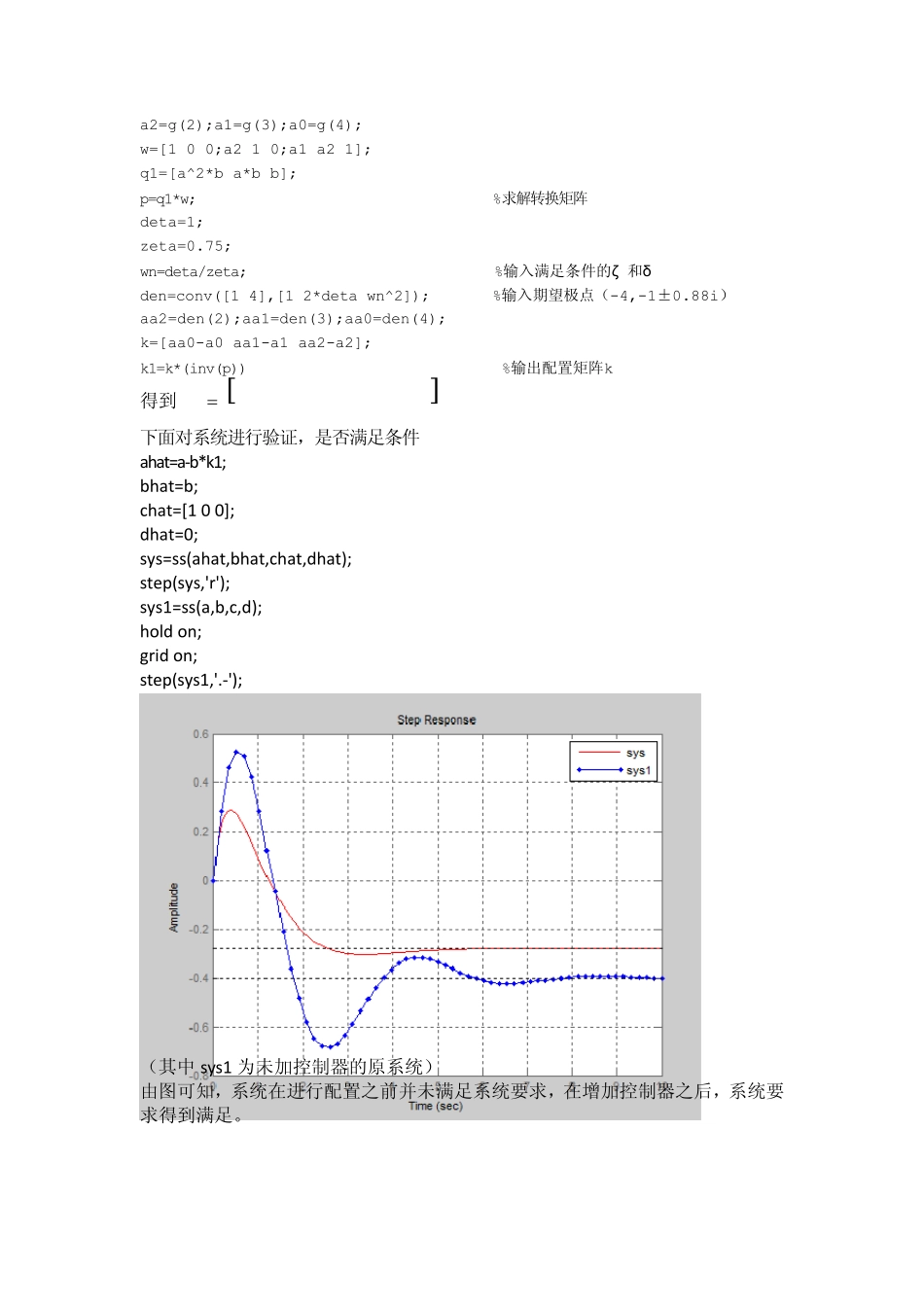
11k 下面对系统进行验证,是否满足条件 ahat=a-b*k1; bhat=b; chat=[1 0 0]; dhat=0; sys=ss(ahat,bhat,chat,dha