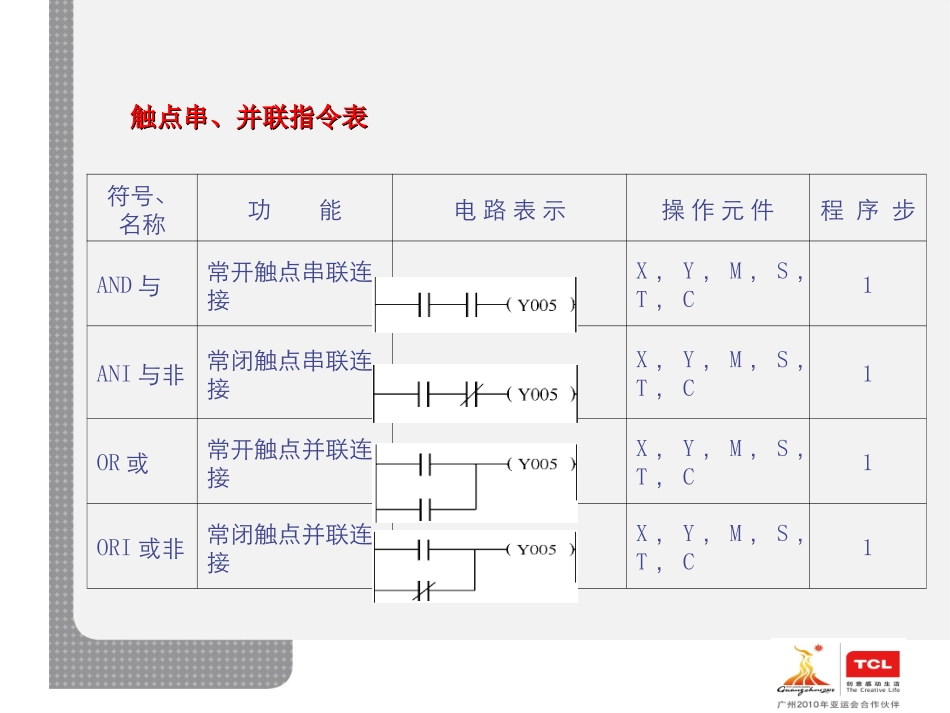
基本逻辑指令梯形图的基本规则基本电路的编程梯形图程序设计的技巧符号、名称功能电路表示操作元件程序步LD取常开触点逻辑运算起始X,Y,M,T,C,S1LDI取反常闭触点逻辑运算起始X,Y,M,T,C,S1OUT输出线圈驱动Y,M,T,C,SY、M:1,特M:2,T:3,C:3~5逻辑取及驱动线圈指令表逻辑取及驱动线圈指令表常用指令的用法常用指令的用法符号、名称功能电路表示操作元件程序步AND与常开触点串联连接X,Y,M,S,T,C1ANI与非常闭触点串联连接X,Y,M,S,T,C1OR或常开触点并联连接X,Y,M,S,T,C1ORI或非常闭触点并联连接X,Y,M,S,T,C1触点串、并联指令表触点串、并联指令表触点串、并联指令用法图触点串、并联指令用法图符号、名称功能电路表示操作元件程序步ORB电路块或串联电路的并联连接无1ANB电路块与并联电路的串联连接无1电路块连接指令表电路块连接指令表串联电路块并联串联电路块并联并联电路块串联并联电路块串联符号、名称功能电路表示操作元件程序步MPS进栈进栈无1MRD读栈读栈无1MPP出栈出栈无1多重输出指令表多重输出指令表多重输出电路指令的应用符号、名称功能电路表示操作元件程序步LDP取上升沿脉冲上升沿脉冲逻辑运算开始X,Y,M,S,T,C2LDF取下降沿脉冲下降沿脉冲逻辑运算开始X,Y,M,S,T,C2ANP与上升沿脉冲上升沿脉冲串联连接X,Y,M,S,T,C2ANF与下降沿脉冲下降沿脉冲串联连接X,Y,M,S,T,C2ORP或上升沿脉冲上升沿脉冲并联连接X,Y,M,S,T,C2ORF或下降沿脉冲下降沿脉冲并联连接X,Y,M,S,T,C2脉冲式触点指令表脉冲式触点指令表符号、名称功能电路表示操作元件程序步SET置位令元件自保持ONY,M,S2RST复位令元件自保持OFF或清除数据寄存器的内容Y,M,S,C,D,V,Z2置位与复位指令表