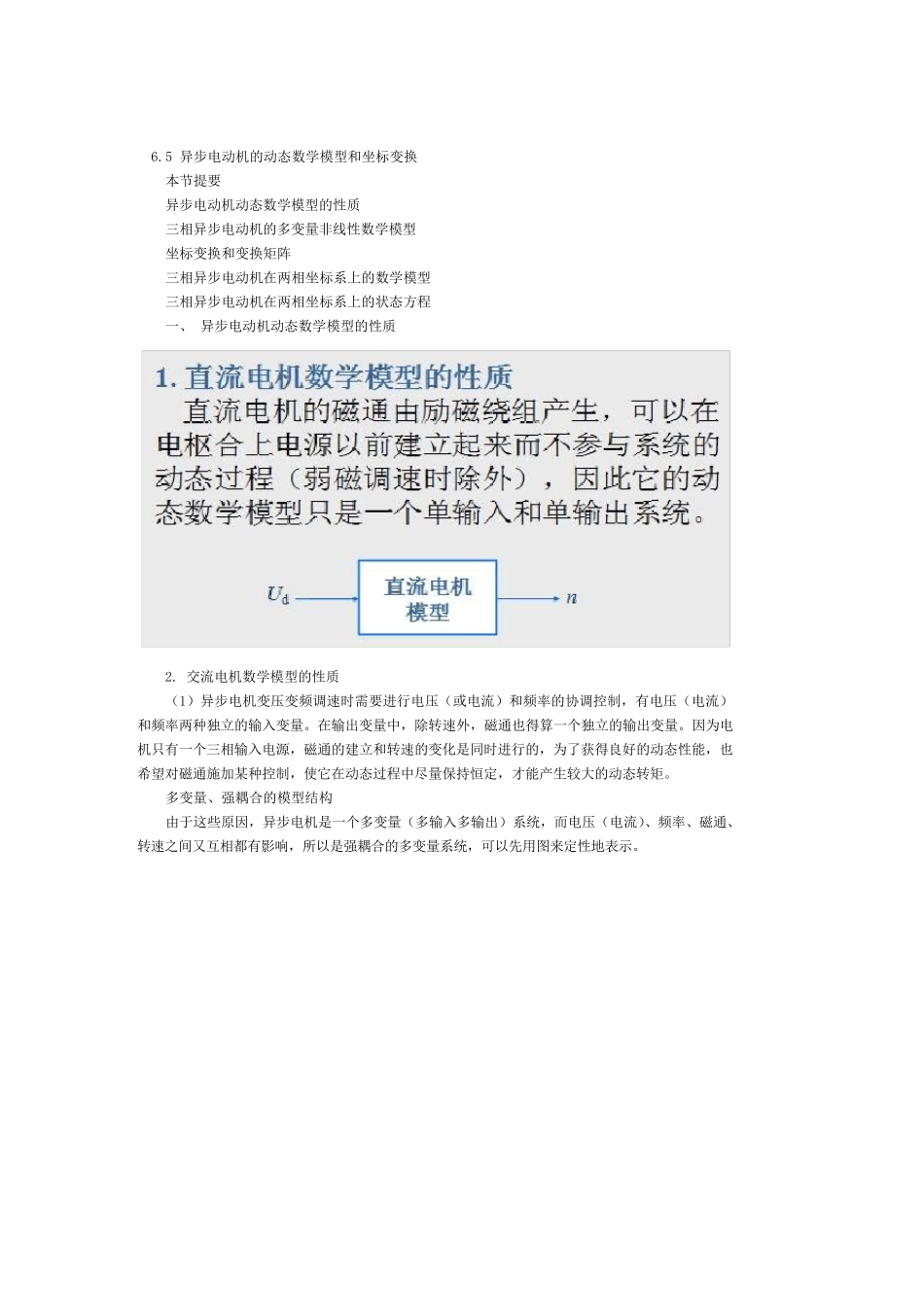
5 异步电动机的动态数学模型和坐标变换 本节提要 异步电动机动态数学模型的性质 三相异步电动机的多变量非线性数学模型 坐标变换和变换矩阵 三相异步电动机在两相坐标系上的数学模型 三相异步电动机在两相坐标系上的状态方程 一、 异步电动机动态数学模型的性质 2
交流电机数学模型的性质 (1)异步电机变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(电流)和频率两种独立的输入变量
在输出变量中,除转速外,磁通也得算一个独立的输出变量
因为电机只有一个三相输入电源,磁通的建立和转速的变化是同时进行的,为了获得良好的动态性能,也希望对磁通施加某种控制,使它在动态过程中尽量保持恒定,才能产生较大的动态转矩
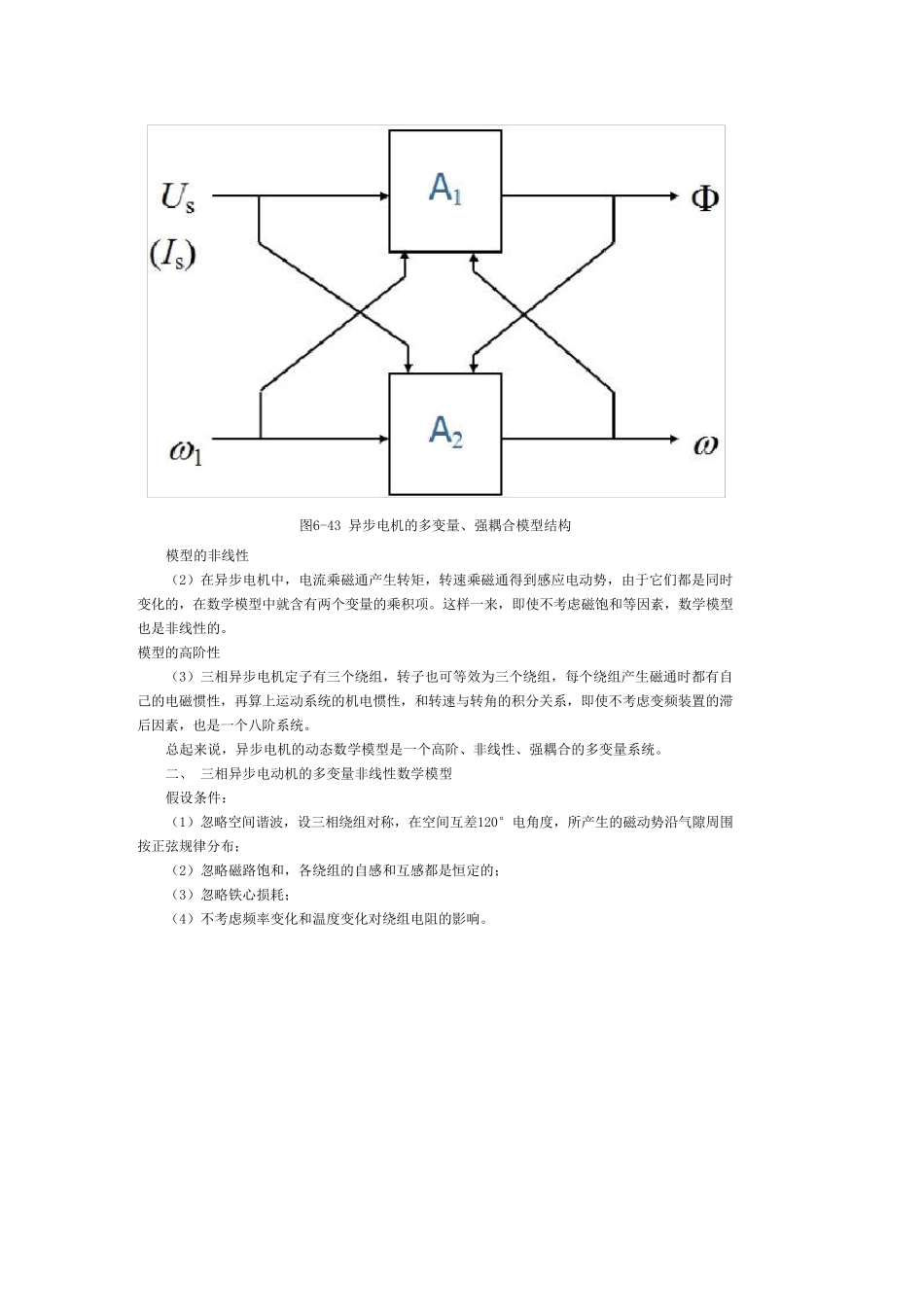
多变量、强耦合的模型结构 由于这些原因,异步电机是一个多变量(多输入多输出)系统,而电压(电流)、频率、磁通、转速之间又互相都有影响,所以是强耦合的多变量系统,可以先用图来定性地表示
图6-43 异步电机的多变量、强耦合模型结构 模型的非线性 (2)在异步电机中,电流乘磁通产生转矩,转速乘磁通得到感应电动势,由于它们都是同时变化的,在数学模型中就含有两个变量的乘积项
这样一来,即使不考虑磁饱和等因素,数学模型也是非线性的
模型的高阶性 (3)三相异步电机定子有三个绕组,转子也可等效为三个绕组,每个绕组产生磁通时都有自己的电磁惯性,再算上运动系统的机电惯性,和转速与转角的积分关系,即使不考虑变频装置的滞后因素,也是一个八阶系统
总起来说,异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统
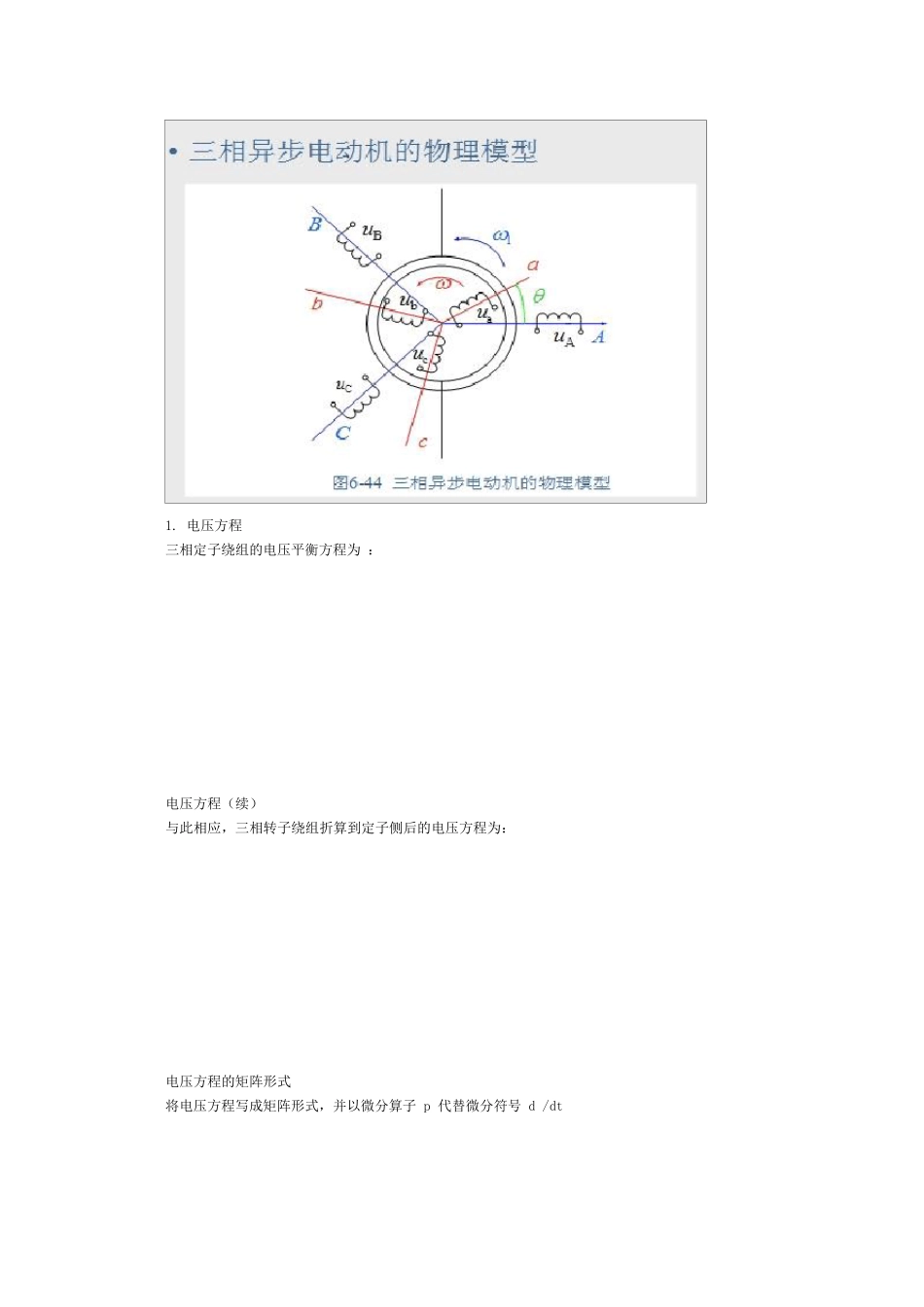
二、 三相异步电动机的多变量非线性数学模型 假设条件: (1)忽略空间谐波,设三相绕组对称,在空间互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布; (2)忽略磁路饱和,各绕组的自感和互感都是恒定的; (3)忽略铁心损耗; (4)不考虑频率变化和温度变化