1 P IDE - 增强型 P ID 功能块 PIDE 功能块为标准的PID 梯形图语言指令提供了更高级的功能
另外,它使用PID 算法的速度形式
增益适用于偏差或 P V 数值的变化,而不适用于偏差或 PV的数值
当使用这个指令时,我们会看到它有很多不同的输入和输出
要想使功能块按照预想的模式运行,则选择并应用正确的输入是非常重要的
本文档的目的是将这些信息分解成不同的部分,以使用户更容易地进行选择
操作状态 程序控制 使用应用程序控制所有的模式
操作员控制 使用 HMI 系统控制 PIDE 功能的正常操作
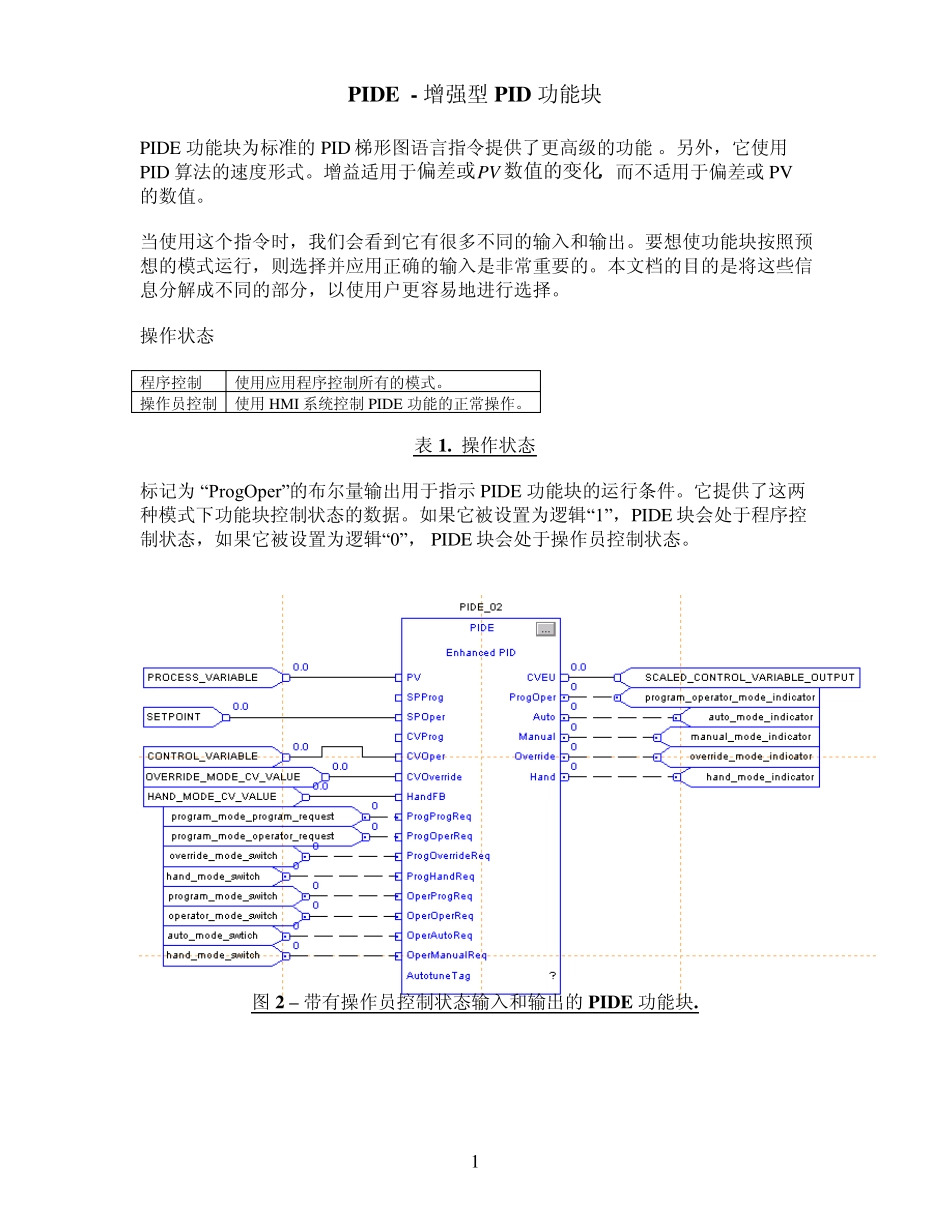
操作状态 标记为 “ProgOper”的布尔量输出用于指示 PIDE 功能块的运行条件
它提供了这两种模式下功能块控制状态的数据
如果它被设置为逻辑“1”,PIDE 块会处于程序控制状态,如果它被设置为逻辑“0”, PIDE 块会处于操作员控制状态
图 2 – 带有操作员控制状态输入和输出的P IDE 功能块
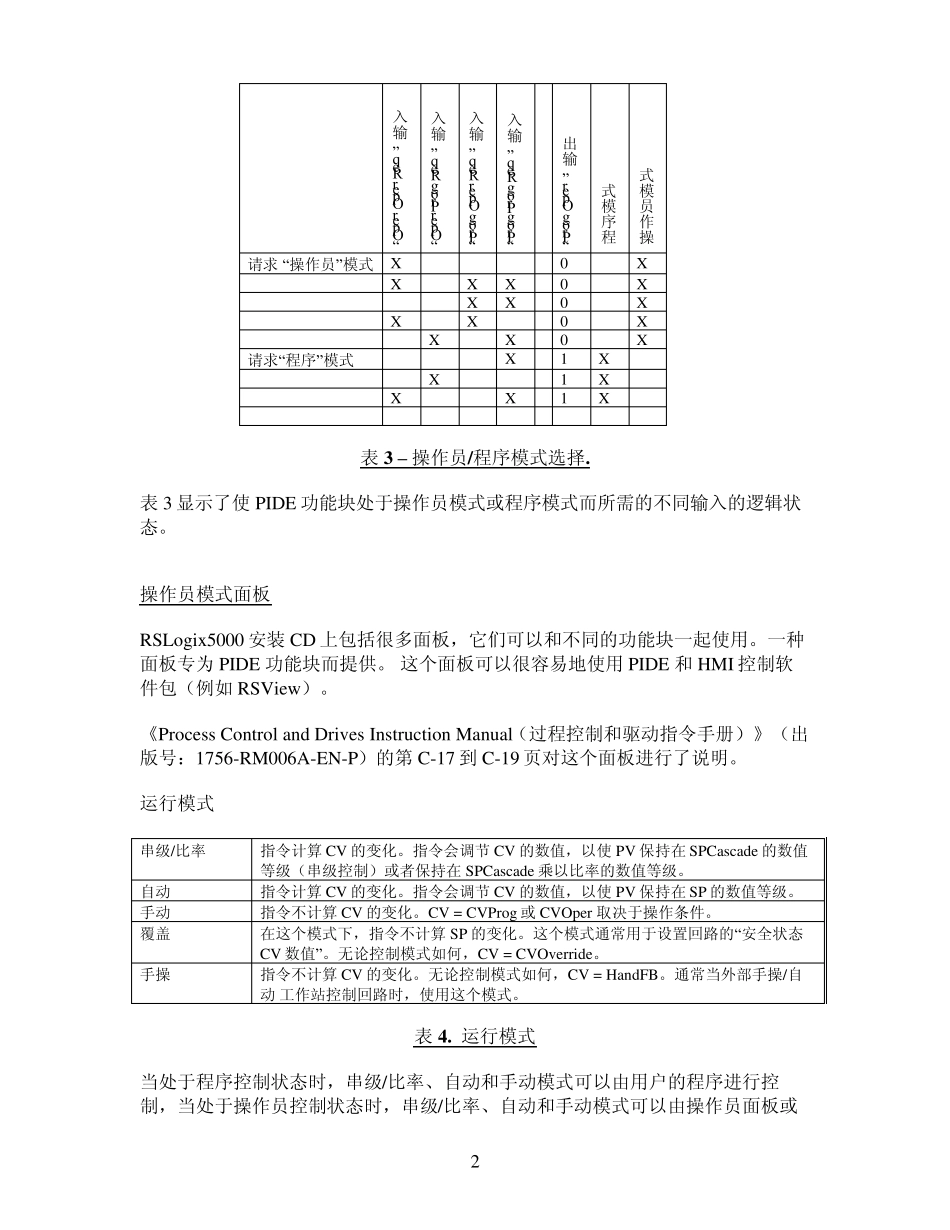
2 “OperOperReq” 输入 “OperProgReq” 输入 “ProgOperReq” 输入 “ProgProgReq” 输入 “ProgOper” 输出 程序模式 操作员模式 请求 “操作员”模式 X 0 X X X X 0 X X X 0 X X X 0 X X X 0 X 请求“程序”模式 X 1 X X 1 X X X 1 X 表 3 – 操作员/程序模式选择
表 3 显示了使 PIDE 功能块处于操作员模式或程序模式而所需的不同输入的逻辑状态
操作员模式面板 RSLogix5000 安装 CD 上包括很多面板,它们可以和不同的功能块一起使用
一种面板专为 PIDE 功能块而提供
这个面板可以很容易地使用 PIDE 和 HMI 控制软件包(例如 RSView)
《Process Control and Driv