在ANSYS 中正确地模拟过盈配合 过盈配合在机械产品的装配中使用的相当普遍
比如轴与轴承、轴与轴瓦、汽车的制动盘等,都是通过一定的过盈量来使两个装配部件紧密地连接起来
下面讨论如何在 ANSYS 中正确地模拟过盈配合
过盈配合在有限元分析中是一种典型的非线性接触行为
在有限元分析中设定了接触,从本质上来讲就是对相互接触的两个部件施加了某种约束,不同的接触算法对于接触约束的处理方法有所不同
接触约束的理论算法的选择,在 ANSYS 中是通过设置 contact 单元的 KEOPT(2) 选项来实现的
在 ANSYS 中目前主要有 5 种接触约束算法: KEYOPT(2)=0 Augmented Lagrangian - 加强的拉格朗日算法, 这是 ANSYS 的缺省选择; KEYOPT(2)=1 Penalty function - 罚函算法; KEYOPT(2)=2 Multipoint constraint (MPC) - 多点约束算法; KEYOPT(2)=3 Lagrange multiplier on contact normal and penalty on tangent - 接触法向采用拉格朗日乘子,接触切向采用罚函数的综合算法
KEYOPT(2)=4 Pure Lagrange multiplier on contact normal and tangent - 法向和切向均采用拉格朗日乘子算法
各种不同的约束算法各有其优缺点,各有各自最适用的场合,具体情况需要具体对待
大部分情况下,默认选择 KEYOPT(2)=0 就够用了
过盈配合所致的接触分析的难点在于如何确定初始接触状态
初始接触状态设置得不对,会导致错误的计算结果或者不准确的计算结果,下面举两个例子来说明
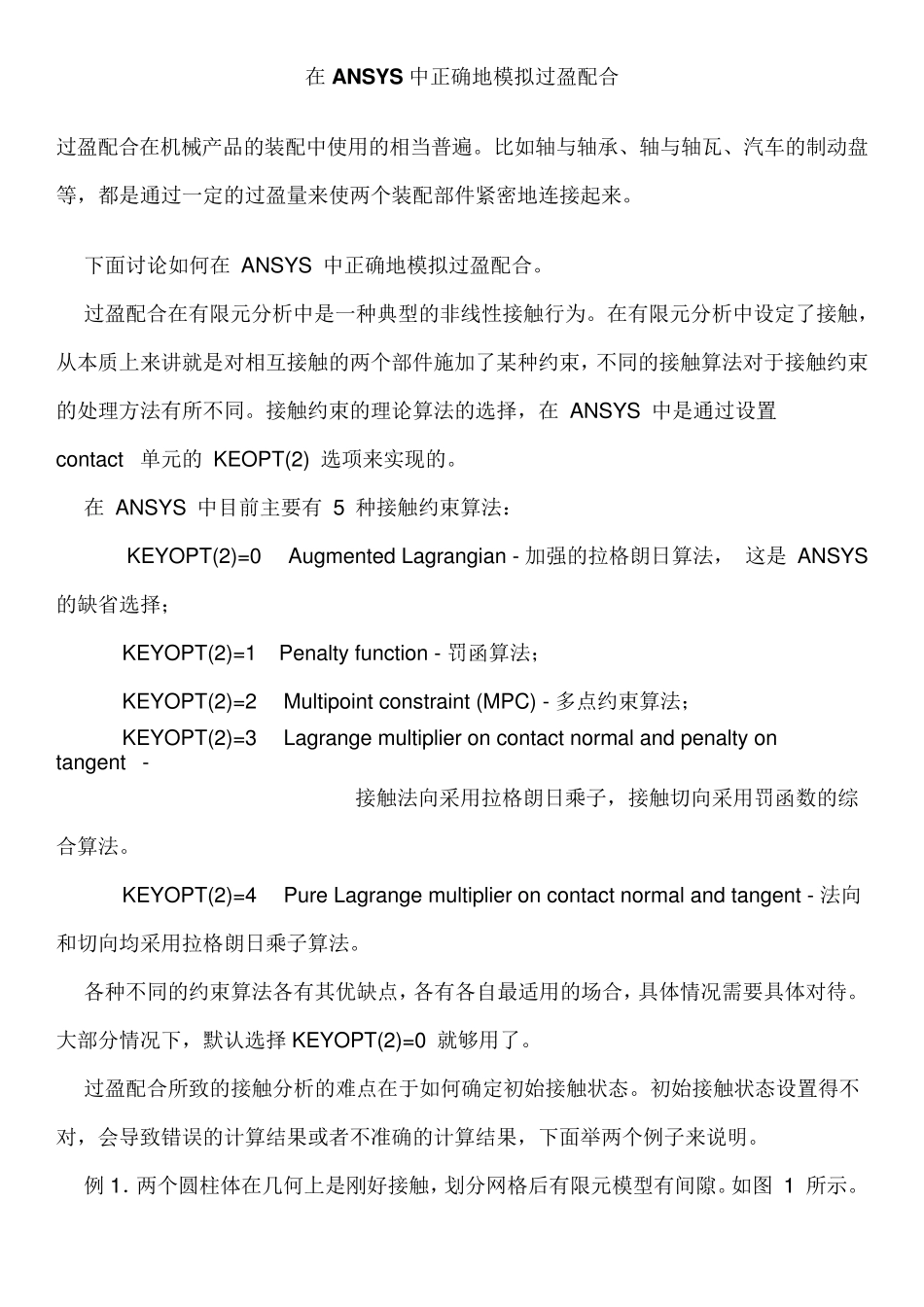
例 1.两个圆柱体在几何上是刚好接触,划分网格后有限元模型有间隙